动捕引擎流程标准汇总
目录
Vicon工作流程
Vicon中的Shogun Live 是一个基于红外线摄像机捕获反光点进行3维定位的系统,主要用于动作捕捉,驱动3维中的角色和数据采集
Shogun Post 是一个数据采集完成后,对数据质量的检测和清理数据、解决数据使用的一款软件
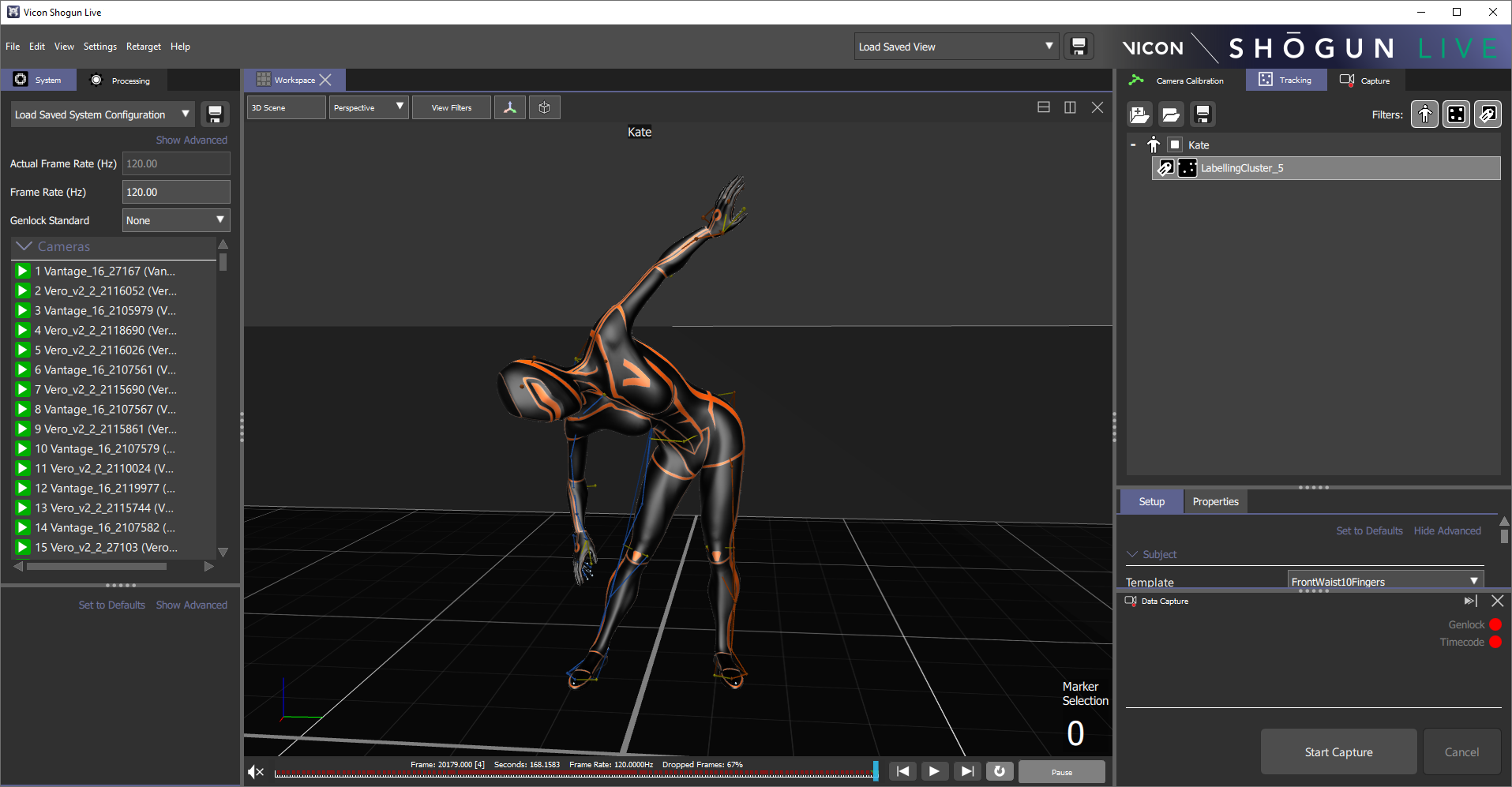
Shogun Live
校准相机
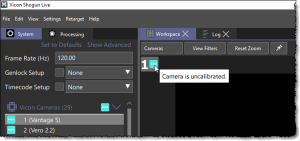
当您第一次连接 Vicon 系统并启动 Vicon Shogun Live 时,请注意在"系统"面板和"摄像机"视图中,图标都会为您提供有关摄像机当前状态的反馈。青色图标表示虽然摄像机已连接,但尚未校准
重要--- 在开始相机校准之前,请确保:
相机已完全预热到稳定的工作温度。Vicon 建议至少 30-60 分钟的预热时间。为了确保频闪活动可以加速预热期,请连接 Vicon 系统并运行 Vicon Shogun Live。
所有相机的灰度模式都设置为Auto。为此,在"系统"面板中,单击并拖动或右键单击以选择所有摄像机,然后在下面的"光学模式"部分中,将"灰度模式"更改为"自动"
屏蔽相机
确保您已从捕获体积中移除任何可能导致反射的物体,例如校准设备或标记
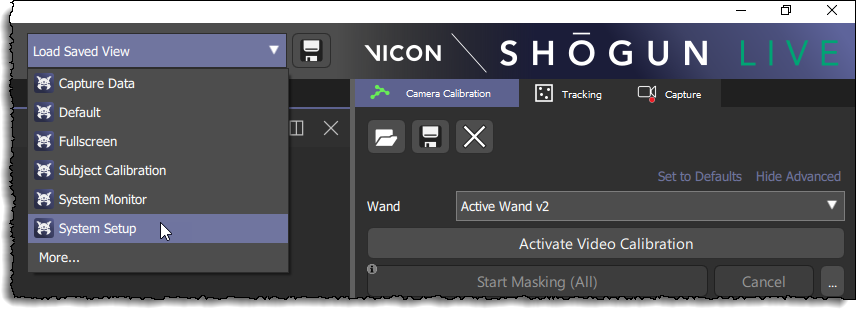
要显示所需的面板,请在加载保存的视图列表中,单击系统设置。
 3. 在 "系统" 面板中,按住 SHIFT 键并单击或拖动以确保选择了所有摄像机,包括 Vicon 系统中的所有摄像机
3. 在 "系统" 面板中,按住 SHIFT 键并单击或拖动以确保选择了所有摄像机,包括 Vicon 系统中的所有摄像机
- 在 "相机校准" 选项卡上,单击 "开始遮罩(全部)" 。

在摄像机视图中,任何摄像机都显示为黑色、空白屏幕。
Shogun Live 开始记录每个连接的摄像机可见的数据。创建的任何相机遮罩在受影响相机的相机视图中显示为蓝色单元格。如果特定摄像机没有可见数据,Shogun Live 不会为其创建任何遮罩。光学和摄像机都被屏蔽了。
大约 5-10 秒后,单击停止屏蔽。
在每个摄像机的摄像机视图中,确保消除任何不需要的反射。(每个视图要么完全空白,要么包含一些蓝色像素。)
挥动"魔杖"校准设备
在"相机校准"选项卡顶部的"魔杖"列表中,确保选择了您正在使用的魔杖类型的选项(这通常是活动魔杖选项之一)
要开始收集魔杖数据,请单击Start Wave。
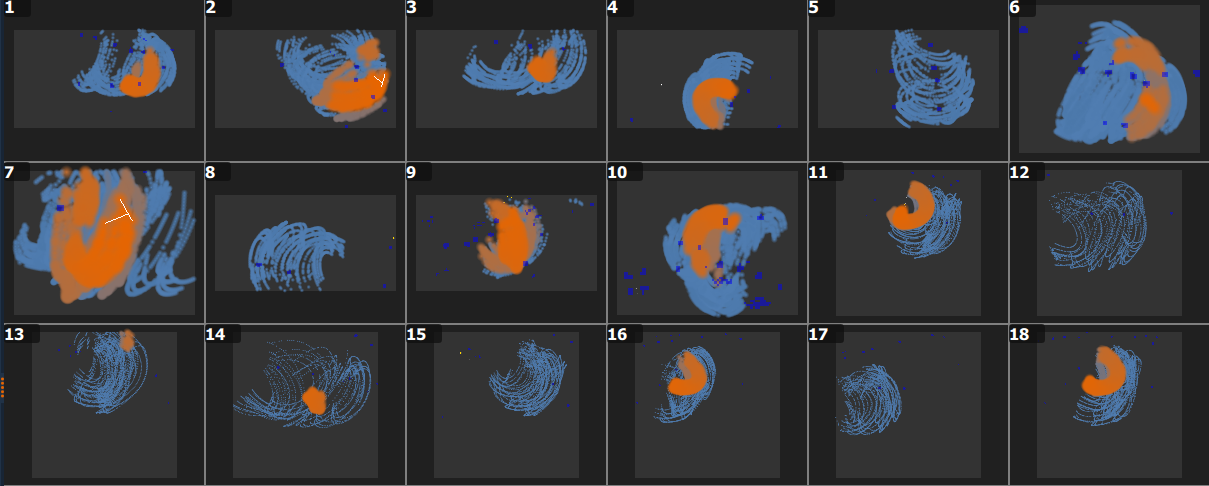
让某人在整个捕获体积中挥动魔杖,覆盖深度和高度,同时您查看所有相机的相机视图以确保获得完整覆盖。确保在魔杖在整个卷中移动时,魔杖上的标记(LED) 尽可能对所有摄像机保持可见。
作为已为特定相机收集到足够的魔杖波数据的指示,每个视图中的显示从橙色变为蓝色。
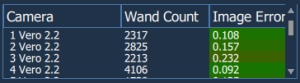
在 "相机校准" 选项卡下半部分的表格中,请注意,随着每个相机捕获到足够的数据,Wand Count列从红色变为绿色。这有助于您专注于为需要更多数据的相机挥舞魔杖。
在"图像错误"列中,除了显示值外,Shogun Live 还会根据摄像机看到魔杖的程度将每个摄像机的状态分级为红色(差)和绿色(极好)。 在音量中,Vicon 光学相机上的显示会发生变化以指示其校准状态:
Vantage 和 Vero 相机:状态指示灯在校准期间变为洋红色并闪烁,完全校准后变为绿色,然后变为蓝色。在 OLED 显示屏(仅限 Vantage 相机)上,饼图指示从相机接收到的所需魔杖数据的比例。
MX T 系列相机:当您执行魔杖挥动时,前面的状态灯会闪烁,然后在收集到足够的数据来校准相机时呈蓝色常亮。
- 收集到足够的数据后,Shogun Live 开始处理魔杖波数据。根据相机的数量和魔杖波捕获的长度,这可能需要几分钟的时间。进度条显示校准进度,下表显示校准结果。
- 当魔杖挥动完成时,一个.xcp和 .x2d文件在C:\ProgramData\Vicon\Calibrations中创建。如果您的校准包括 Vicon 摄像机,则会创建两个x2d文件。这些文件是:
LatestCalibration.x2d,其中包含没有任何 Vicon 摄像机的魔杖波
LatestCalibration_withVideo.x2d,其中包含包括 Vicon 摄像机在内的魔杖波形
设置原点
捕获魔杖波后,设置体积原点和轴,以便 Shogun Live 中的摄像机和体积反映摄像机相对于捕获体积以及彼此之间的实际位置。
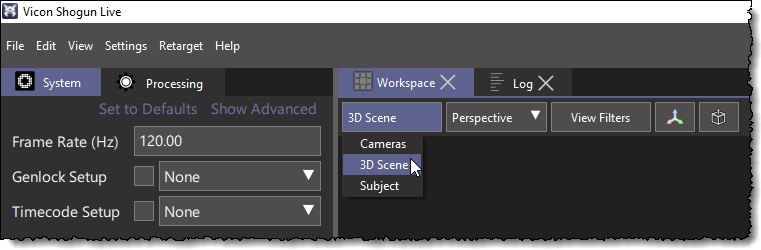
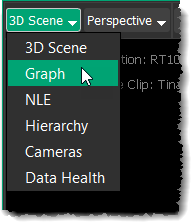
为了让您能够看到与体积相关的轴,在工作区选项卡上,将视图更改为3D 场景。
将校准设备放在捕获体积地板上您希望体积原点所在的位置和您希望轴所在的方向(反映在3D 场景视图中显示的轴中)。
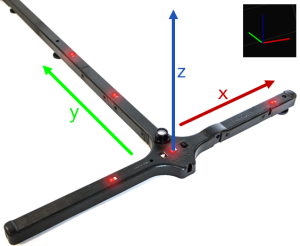
X:红线 Y:绿线 Z:蓝线
在Camera Calibration选项卡顶部的Wand列表中,确保选择了适当的 Active Wand。
在Camera Calibration选项卡的Set Volume Origin单击Start开始设置原点。
该按钮显示设置原点。
几秒钟后,单击Set Origin。
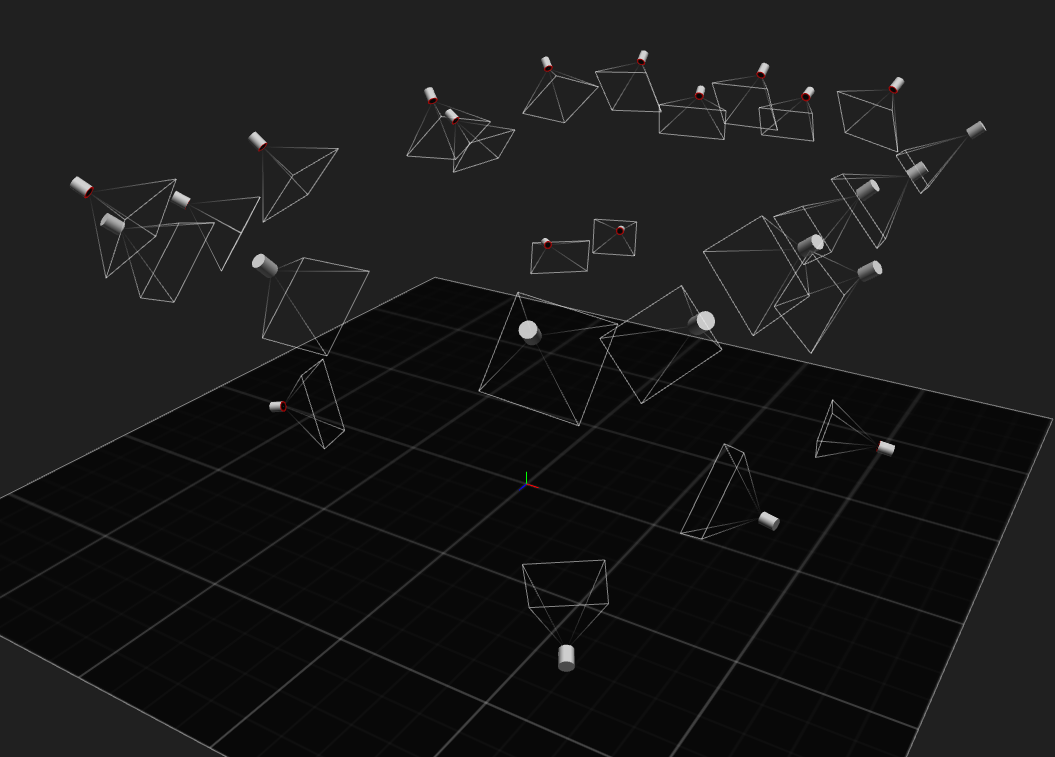
在3D Scene 中,显示View Filters选项,并在Volume选项下,确保选择了Cameras。
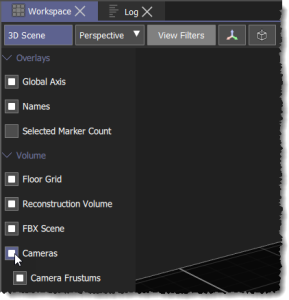
在3D 场景,透视视图中,所有摄像机作为一个组移动,因此捕获体积的原点与魔杖对齐。
设置地面
校准 Vicon 相机的最后阶段是设置地板平面,使用体积中的标记自动定义它
设置地板平面:
确保您已完成相机校准程序的其余部分并设置原点
将至少四个 14 毫米 Vicon 标记放在捕获场地的底部。
在Camera Calibration选项卡上,Set Floor Plane单击Start设置地板平面。
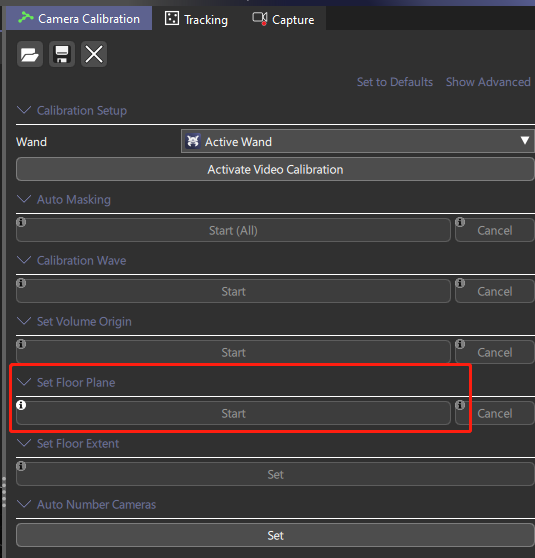
Alt+左键框选Vicon标记点,单击Set Floor Plane。
创建主题道具
校准 Vicon 相机后,您就可以创建和校准您需要的拍摄对象和任何道具。
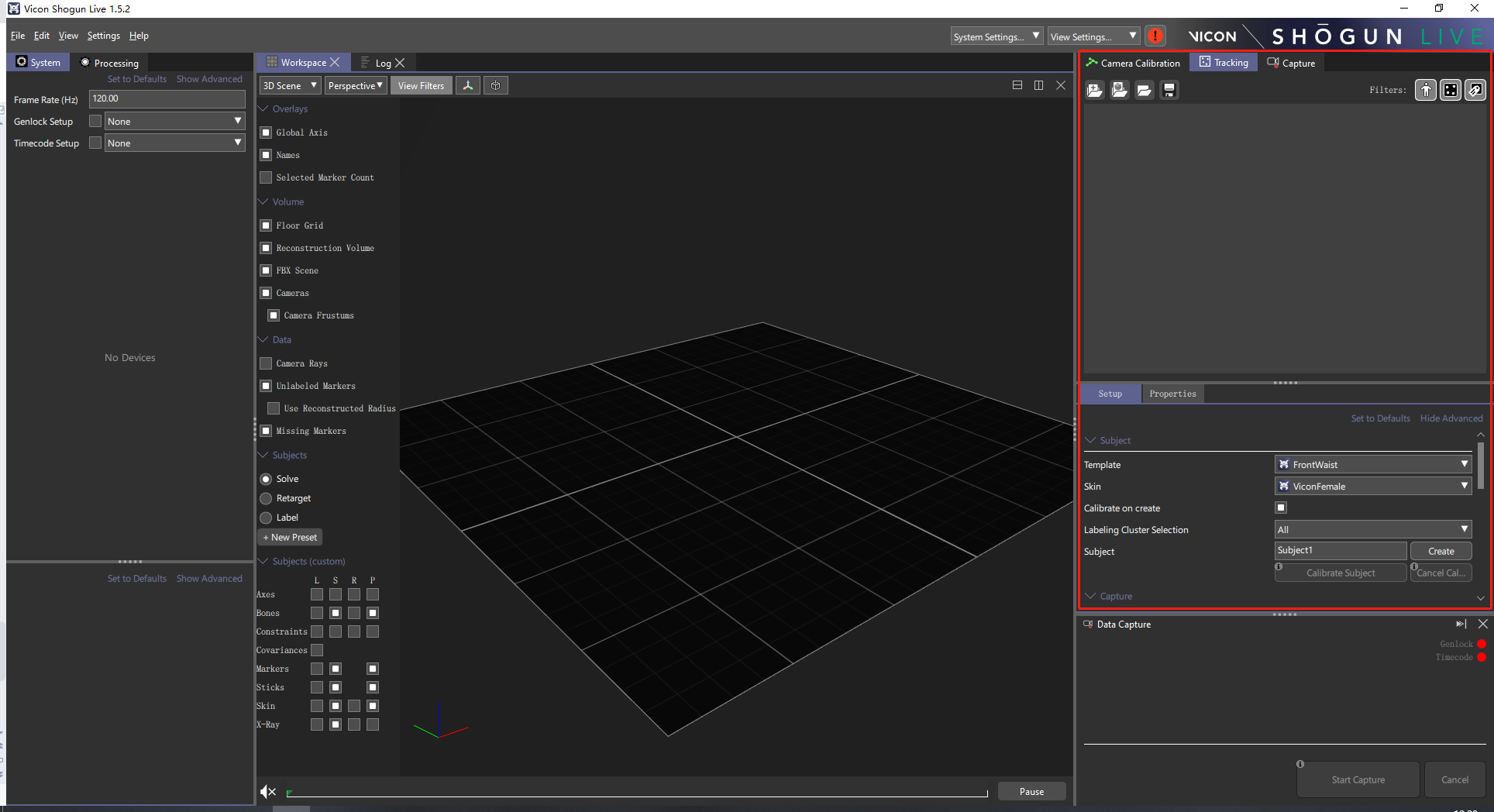
选择标记模板
根据您的要求选择一个标记模板
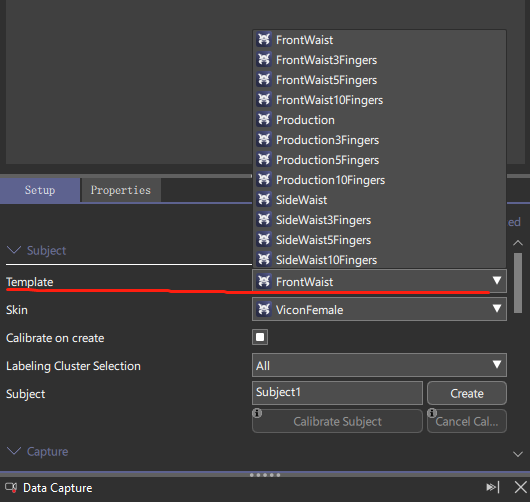
Front Waist(前腰标准53个标记集)
Front Waist3Fingers(前腰标准53个标记集加上3个手指标记)
Front Waist5Fingers(前腰标准53个标记集加上5个手指标记)
Front Waist10Fingers(前腰标准53个标记集加上10个手指标记)
Production(专业版标准57个标记集)
Production3Fingers(专业版标准57个标记集加上3个手指标记)
Production5Fingers(专业版标准57个标记集加上5个手指标记)
Production10Fingers(专业版标准57个标记集加上10个手指标记)
Side Waist(替代前腰标准标记集,可避免前腰标记遮挡)
Side Waist3Fingers(侧腰标准53个标记集加上3个手指标记)
Side Waist5Fingers(侧腰标准53个标记集加上5个手指标记)
Side Waist10Fingers(侧腰标准53个标记集加上10个手指标记)
选择蒙皮
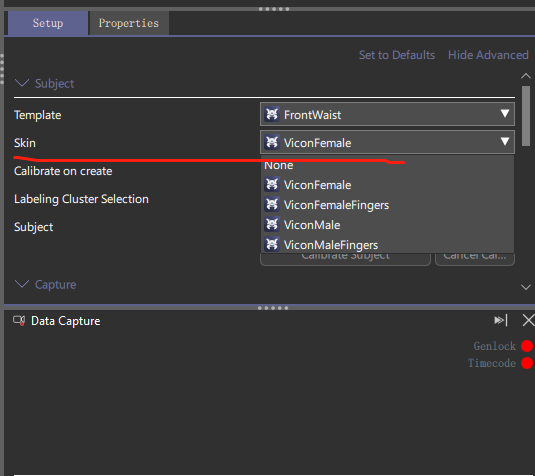
Vicon Female(女性)
Vicon Female Fingers(女性带手指)
Vicon Male(男性)
Vicon Male Fingers(男性带手指)
在Tracking选项卡的Subject列表,在Subject输入角色ID,单击Create创建。
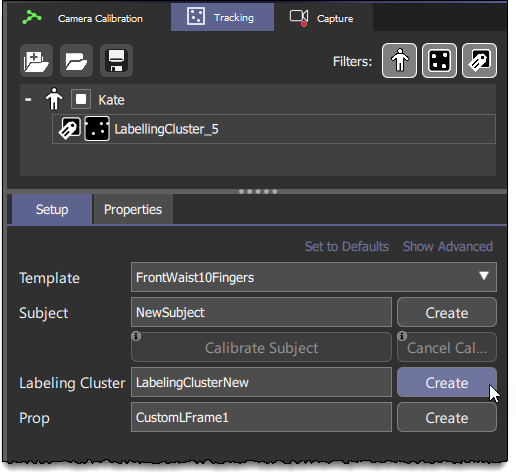
将标签集群添加到数据储存(可选步骤)
将标记点放置在场中,并确保所有标记对摄像机可见。
在3D 场景中,按住 ALT 键并框选至少五个标记。
在Tracking面板中,确保选择了Setup选项卡Object栏,并在Labeling Cluster字段中,输入新集群的名称,然后单击相邻的Create按钮。
演员身上的贴点方式
在下面的图像示出了标准ViconFrontWaist 53标记组,并且还示出了标签集的位置。



这些图像显示了专业标记集的标记放置(带有 10 个手指标记):




如果您使用侧腰标记,请将腰标记放在表演者腰部的两侧:


确保放置足部标记,以便脚趾标记在脚上尽可能向前,同时仍朝上。还要确保其他三个标记(脚后根标记和脚前部两侧的两个标记)在同一平面上,并且尽可能低(即靠近地板)。



数据命名与采集
数据采集
Vicon Shogun Live 使您可以直接从实时捕捉到后期处理。数据保存为 mocap 文件 (.mcp),其中包含当前校准、活动对象和实时数据的副本,以及.mcp 文件的路径。x2d(一个 XML 文件,包含 2D 摄像机数据)和系统中的任何摄像机。一旦您捕获了镜头(.mcp文件),您就可以在不离开 Live 的情况下重放和查看它们。为了清理,您打开 .Shogun Post 中的mcp文件。
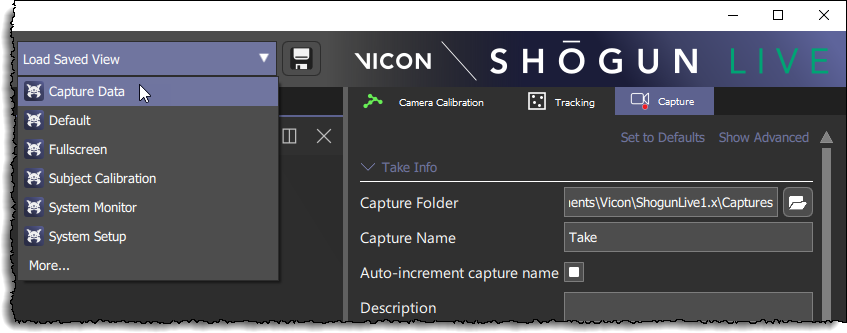
请注意,对于捕捉镜头,您可能会发现使用捕捉数据布局来显示您将用于运动捕捉的视图和面板是最简单的。为此,在菜单栏右上角的加载保存的视图列表中,单击捕获数据。
确保您已完成创建主题和创建道具中所述的必要准备工作。
在Processing面板顶部的General部分,确保将Processing Output级别设置为Retargeting(默认)或Solve,具体取决于您的要求,并且选择了Occlusion Fixing。
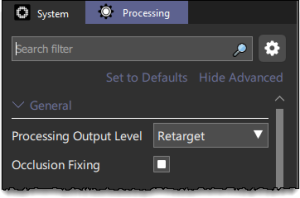
**<span style="color:red">重要</span>**
**<span style="color:red">为了确保您记录所需的数据,请务必在捕获前检查处理输出级别。通常,确保将其设置为Retargeting(默认)或Solve。如果将其设置为Reconstruct,系统将仅保存重建的数据,并且在 Shogun Post中打开数据时将看不到任何标签或求解骨架。同样,如果您选择Label,您将不会在Post 中看到求解骨架。</span>**
在 Shogun Live 窗口的右侧,确保选择了Capture选项卡。
在Take Info部分中,单击Capture Folder字段右侧的文件夹图标,然后选择您创建的Session文件夹,如创建文件夹层次结构以存储Take中所述。您从现在开始捕获的任何内容都将保存在您创建的数据库中。
在Capture Name字段中,输入一个合适的名称,使您能够识别该镜头。
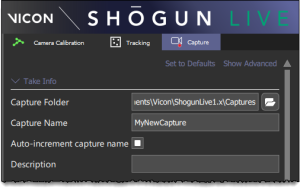
如果您要捕获多个镜头,要在序列中每个镜头的捕获名称末尾附加一个数字,请确保选择了自动增量捕获名称。
捕获缓冲区大小也会显示。这表示分配给 Shogun Live 的捕获的内存量。默认情况下,这设置为 2GB,这对于大多数情况来说应该足够了。
在捕获任何数据之前,您可能希望根据需要重新定位和/或调整数据捕获面板的大小(要移动它,拖动其标题栏)。
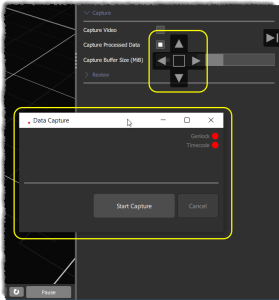
在Data Capture面板(默认情况下在 Shogun Live 窗口的右下角)中,单击Start Capture。在面板和视图窗格顶部的菜单栏中,都会显示一个闪烁的红色圆圈和Capture Active。
提示
如果可能,请以T姿势开始和结束每个镜头。这有助于标记和重新定位。
数据以源帧速率捕获到磁盘。
底部的栏当实时系统跟不上目标帧率而不得不丢帧时,会显示红色标记。还显示了丢帧的百分比。除非这个数字变得非常高(超过 30%),否则您可以继续捕捉。如果高于 30%,这通常表明您的系统未校准,无法跟上当前正在处理的数据量。在这种情况下,您可能需要重新校准甚至升级您的 PC。
审核标准
校准相机
校准时确保场地内没有反光标记物
在屏蔽后不能移动被屏蔽的物体
校准过程中摄像机不能有移动和震动
创建主题道具
创建过程中优先使用标签集分配给演员
模板的创建使用专业版57个标准方式(前腰或者侧腰以拍摄内容而定)
演员需要站在场地中央进行校准动作
校准动作:头部扭动、大臂甩动、小臂甩动、手腕甩动、腰部扭动、左脚前抬腿、右脚前抬腿、左脚提膝外翻、右脚提膝外翻、左踝扭动、右踝扭动、双脚踮起脚尖。
创建完成后模型不能有某部位扭曲的姿势
数据采集
数据命名按照:项目缩写_集数_场次_镜头号_000_次数
演员要在规定的范围内进行表演
表演动作:背手动作需要隔点间隙
数据质量:出现3次以上的扭曲和标记点丢失需要重新录制
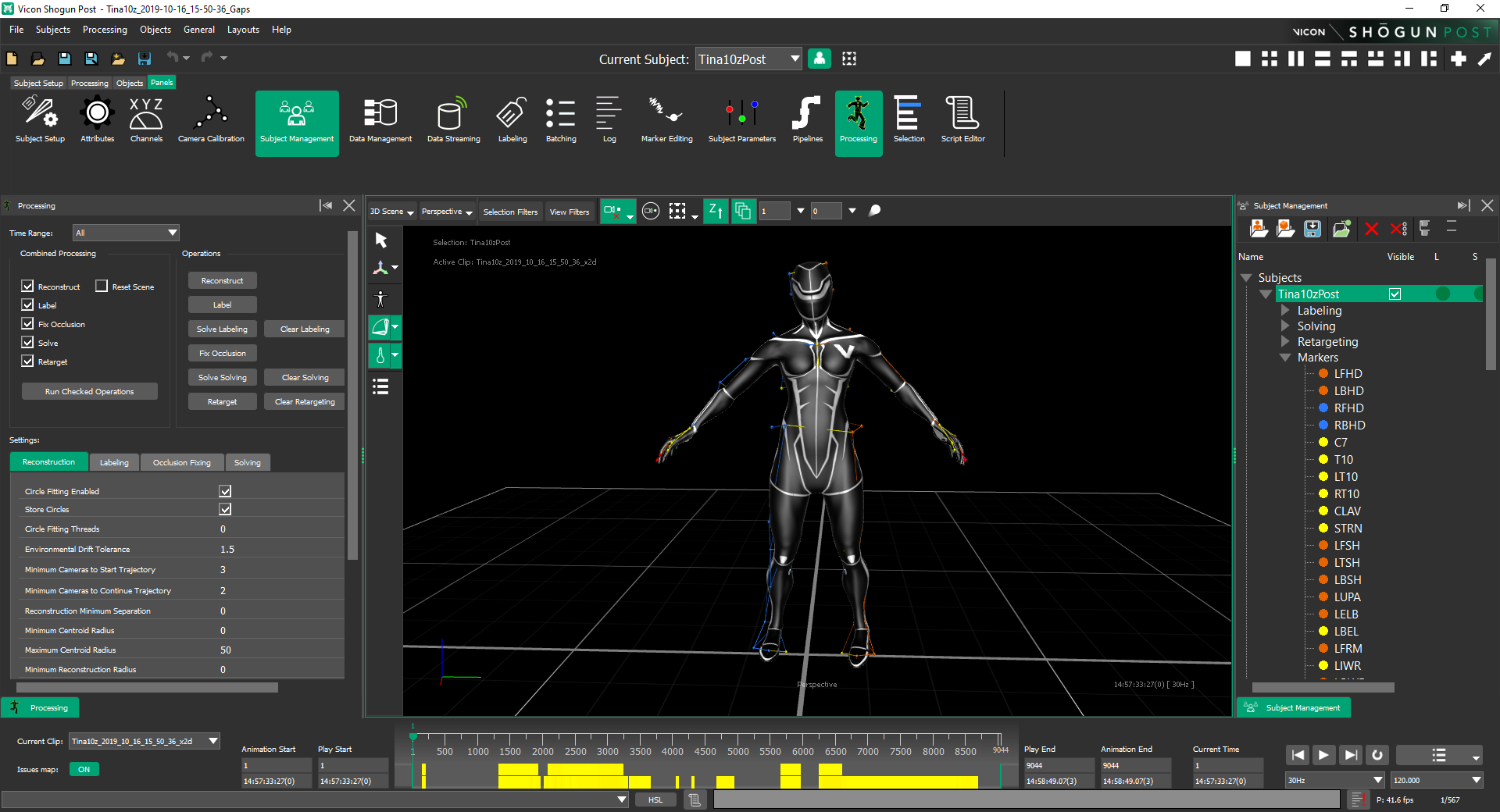
Shogun Post
检查数据质量
将捕获的数据文件加载到 Vicon Shogun Post 后,您可以使用其诊断工具来帮助您识别数据的任何问题。

将动作捕捉数据加载到Shogun Post
- 要加载动作捕捉数据文件(.MCP包含一切都在Shogun现场拍摄的,或者,VDF,你可以保存在shogun后)
打开 Windows 资源管理器,找到您保存的文件并将它们拖放到 Shogun Post 视图窗格中
在文件菜单上,单击打开并找到您的文件
在"数据管理"面板中,找到所需的文件图标(.mcp带有紫色图标)并双击它
尽管推荐的工作流程是加载 .mcp文件(处理的实时数据),您可以改为导入 .x2d(原始 2D 数据),但在这种情况下,您必须在进行任何所需的清理之前运行重建、标记和遮挡修复操作
1.如果您选择了一个 .mcp文件,如果检测到丢帧,则会出现一个对话框,通知您文件中丢帧的百分比,并询问您是否要重新处理以修复它们。
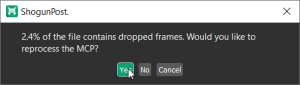
2.要自动重新处理文件以修复丢失的帧,请单击是 。
这 .mcp文件被打开到场景中,整个镜头被重新处理。丢失的帧被重建、标记和解决,平滑地整合来自相关的数据。x2d文件转换为现有数据。(如果您单击No,处理会更快,因为 Shogun Post 只是在丢失的帧之间进行插值,但请注意,不会创建任何关键帧,您仍然需要修复丢失的帧。)
快速MCP再处理
- 使用HSL进行快速MCP再处理
执行脱机状态再处理 x2d 的快速发布操作。
要直接处理到 MCP,请使用-readMCP和-writeMCP选项指定源和输出 MCP。
功能区域
数据编辑
命令语法
句法
quickPost processingLevel [-ranges] [-currentFrame] [-resetScene] [-selected] [-writeMCP string] [-readMCP string]
参数
| 名称 | 类型 | 必需的 | 注释 |
|---|---|---|---|
| processingLevel | 是的 | 所需的处理类型("reconstruct"、"label"、"solve"、"labelocclusionfix"、"occlusionfixsolve"、"labelsolve"、"labelocclusionfixsolve"或"retarget") |
标记
| 名称 | 标记参数 | 参数类型 | 专供 | 注释 |
|---|---|---|---|---|
| ranges | 处理当前捕获的指定范围。 | |||
| currentFrame | 处理当前捕获的当前帧。 | |||
| resetScene | 重置当前场景。从场景中删除所有动画数据和未标记的标记,但不影响设备和 VST/VSK(相当于"处理"面板中的"重置场景"选项)。 | |||
| selected | ||||
| writeMCP | 一串 | 指定输出 MCP,包括路径(请参见下面的示例)。 | ||
| readMCP | 一串 | 指定要处理的源 MCP,包括路径(请参见下面的示例)。该过程使用与 MCP同名的 X2D 文件,因此请确保具有匹配名称的 X2D 位于同一文件夹中。 |
- 使用ShogunPostCL重新处理
您还可以运行 quickpost 命令来重新处理 .直接来自 ShogunPostCL 的mcp文件,例如:
要打开 ShogunPostCL,请导航到:C:\Program Files\Vicon\ShogunPost1.5,然后双击ShogunPostCL.exe打开终端。
在 ShogunPostCL 终端窗口中,输入:
quickPost processingLevel -readMCP\ "C:\\myPath\\myInputFile.mcp"-writeMCP\ "C:\\myPath\\myOutputFile.mcp";
注释:
processingLevel=中的任何一个:reconstruct,label,solve或retarget(请注意,如果指定retarget,必须有相关的重新定位设置。)
之后的路径-readMCP= 的路径。要运行丢帧修复的mcp文件。确保相关的.x2d文件位于同一文件夹中。
myInputFile.mcp= 的名称。要运行丢帧修复的mcp文件
之后的路径-writeMCP= 完全处理输出的路径。mcp文件
myOutputFile.mcp= 完全处理的名称。mcp文件
批处理模式下的快速MCP再处理
如果需要,您还可以在批处理模式下直接在多个文件上修复掉帧,如下所示。
要以批处理模式直接重新处理 MCP 文件:
在批处理面板中,将模式设置为Post Process。
在设置部分,确保选择重新处理 MCP。
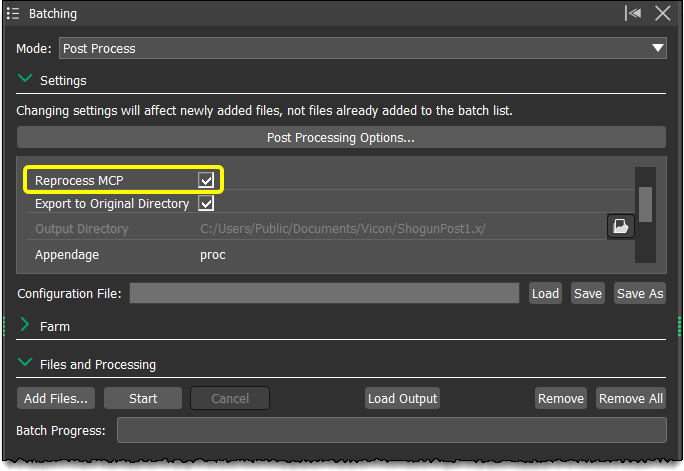
设置所需的文件路径和命名选项。
在处理面板中,设置所需的处理设置。
在批处理面板中,展开文件和处理部分,单击添加文件并添加所需的 .mcp文件到批处理。
单击开始。
这 .mcp文件无需加载到 Shogun Post 即可处理。
当您加载新的 .mcp文件导入 Post,它被完全处理,没有掉帧。
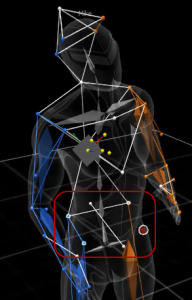
3D场景视图中可能显示的各种类型数据
- 标记点符号
| 3D 视图中的符号 | 描述 | 数据类型 |
|---|---|---|
 | 中心有一个点的球体 | 在间隙期间已被遮挡固定的标记 |
 | 中心有十字的球体 | 已手动填充间隙的标记 |
 | 红色球体 | 当前帧丢失的标记 |
 | 球体 | 无间隙标记 |
 | 圆圈 | 来自备份剪辑的原始标记标记。如果原始标记和遮挡固定标记的位置之间的差异大于 1 cm,则默认显示。 |
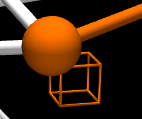 | 线框 | 约束,显示标记的预期位置 |
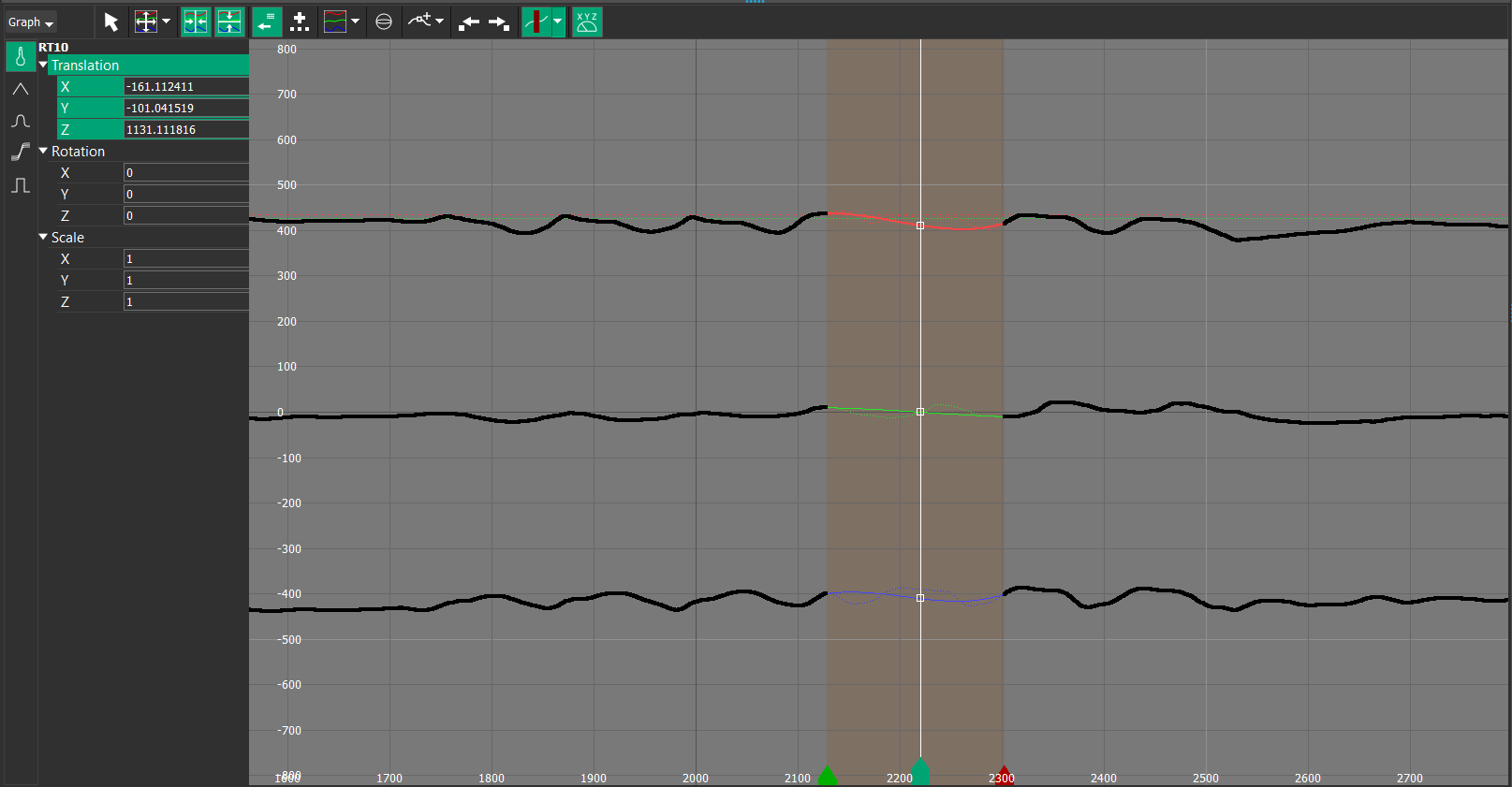
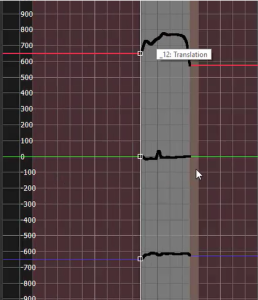
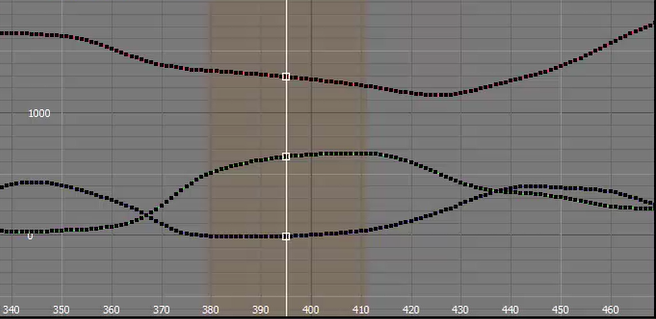
- 使用图表视图查找问题
在图形视图中,您可以看到所选标记的 X、Y 和 Z 位置以及间隙的图形表示。这在填充间隙时很有用,因为它为您提供了另一种检查间隙填充对于数据是否合理的方法。
要打开Graph视图,请在视图窗格中单击 View type 按钮,然后选择Graph。
要选择并填充标记中的间隙:
要保持数据运行状况视图以及3D 场景视图打开,请单击窗口右上角的三向拆分按钮之一来拆分屏幕,例如向左拆分三个视图按钮

与"数据健康"视图中一样,如果场景中有多个剪辑,您可以通过单击"指定剪辑上的显示间隙"按钮上的箭头来选择所需的剪辑
 .要在图表中时间指示器的当前位置显示所选标记的 X、Y 和 Z 值,请单击"显示显示通道"按钮
.要在图表中时间指示器的当前位置显示所选标记的 X、Y 和 Z 值,请单击"显示显示通道"按钮
在3D 场景视图中,选择标记。在"数据运行状况"视图中,双击间隙以选择其范围。的图形立即查看显示所选标记物的所有键。与数据运行状况视图一样,任何差距都清晰可见。
通过右键单击并拖动以获得更清晰的视图或使用"缩放"按钮下的选项之一进行放大

您现在可以根据需要使用标签面板或扩展上下文菜单中的选项之一(按 CTRL+ALT 并在图形视图窗格中右键单击)。
- 使用时间范围
在识别和修复捕获数据中的问题时,您通常需要选择一个特定的时间范围来工作。
选择和清除时间范围:
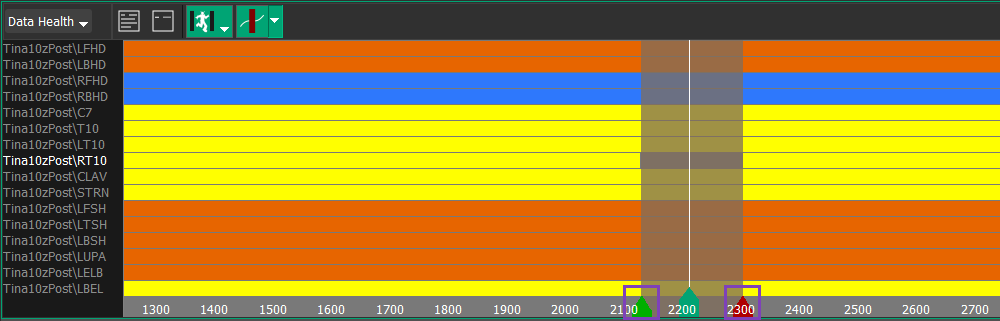
在主时间栏上的数据运行状况和图表视图中,选择一个范围(ALT+拖动)。 将显示指示所选范围开始和结束的绿色和红色三角形。

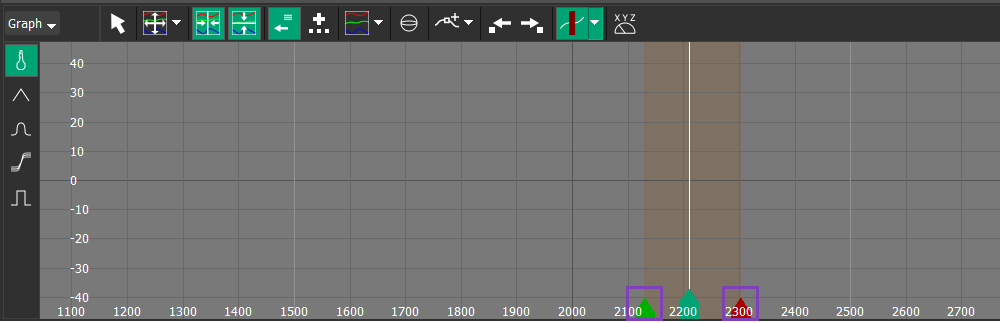
要调整时间范围的开始或结束,请在时间栏、数据运行状况视图或图表 中,将鼠标指针悬停在所需箭头上并拖动它。
要清除选定的范围,请在该范围内按 ALT+双击。
清理数据
如果您的视觉评估和 Vicon Shogun Post 的诊断工具发现您记录的数据存在问题,您可以使用其清理工具来纠正错误标签并填补任何空白
查找并修复不良数据
为了帮助您识别和修复错误数据,您可以使用"标记编辑"面板。
查找和删除不良数据:
要打开"标记编辑"面板,请在"处理"菜单中单击"标记编辑"(或单击功能区的"处理"选项卡上的"标记编辑")。
在Remove Bad Data部分中,转到Find Bad Data按钮并注意以下选项:
阈值允许偏差
截止数据过滤器。减小此值会更严格地过滤数据。
灵敏度放大截止滤波器的效果。
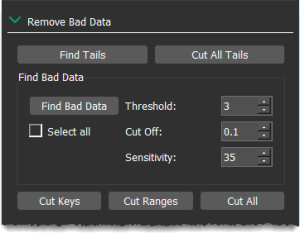
单击查找错误数据。
试验这些值以找出最适合您的数据的值。
识别出错误数据后,单击相应的"剪切"按钮将其删除,然后应用填充
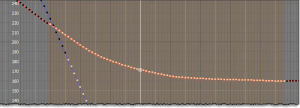
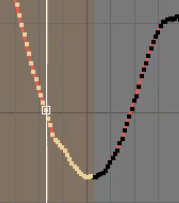
查找并修复噪波
可以在图表视图中轻松识别噪声:
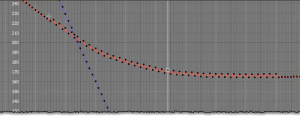
当您在3D 场景视图中播放时,它还会产生闪烁。您可以使用"标记编辑"面板中的过滤选项修复它。
修复噪声数据:
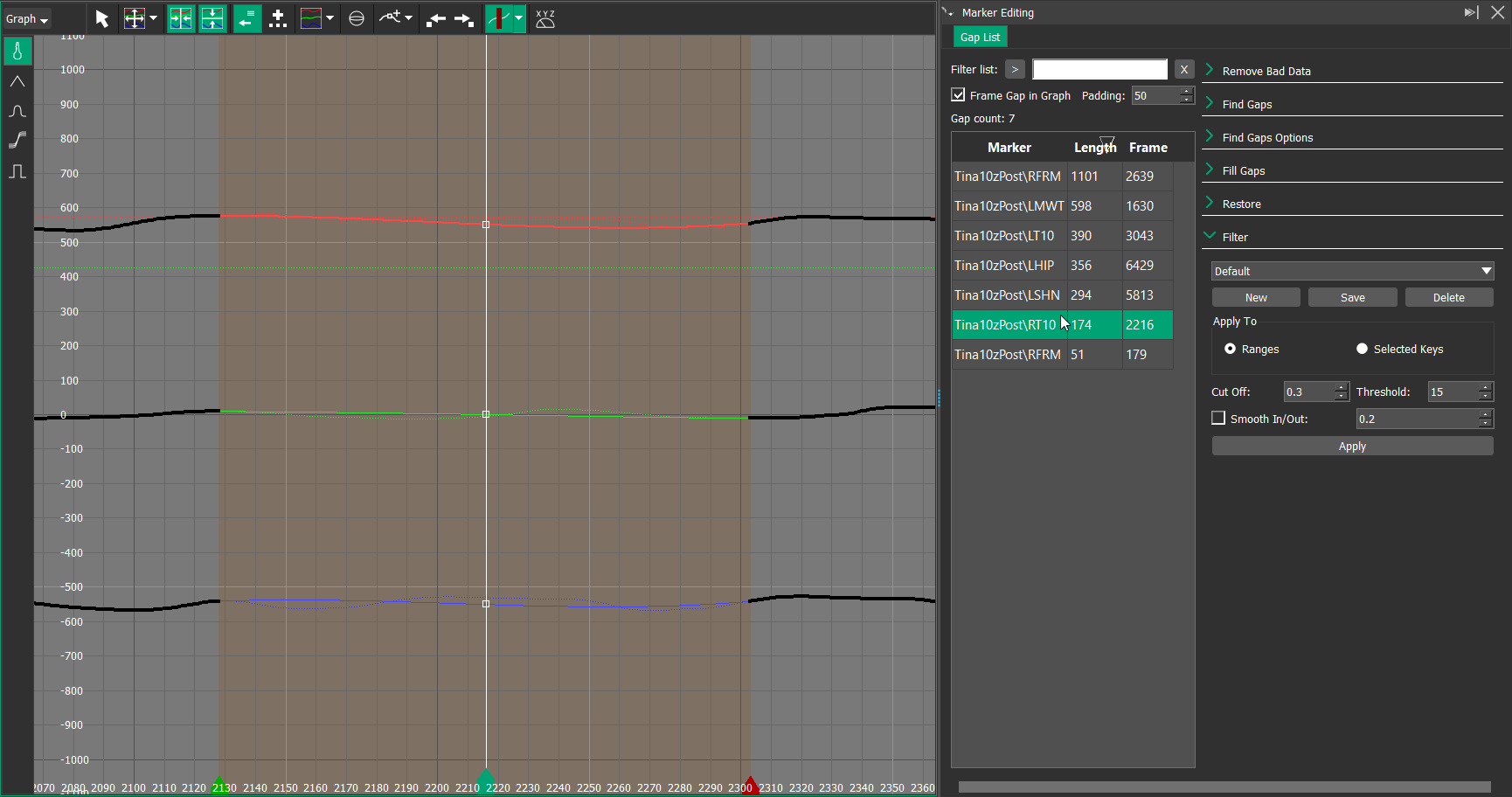
在图表视图中,按住 ALT 键并拖动以选择它。
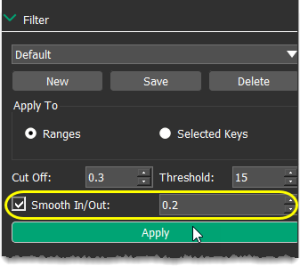
在Marker Editing面板的底部,展开Filter部分,然后选择过滤是应用到Ranges,如上还是应用到Selected Keys。
如果您不确定要对数据应用多少过滤,请保留默认设置(隔断:0.3 和阈值:15)并单击应用。您可以根据需要多次重新申请。
在Graph视图和3D Scene视图中,检查轨迹现在在所选范围内是否平滑。
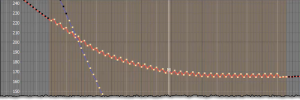
确保平滑开始和结束的过滤轨迹
应用过滤时,"标记编辑"面板中的"平滑入/出"选项会在轨迹曲线的过滤部分的开始和结束处提供平滑混合。
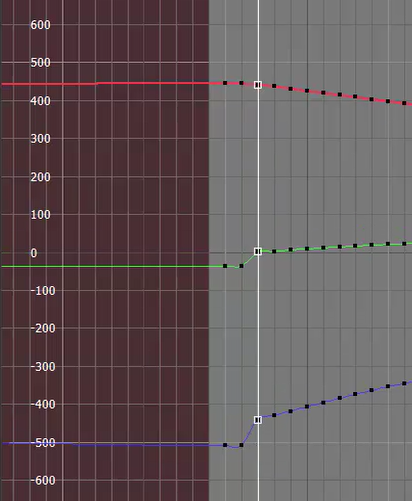
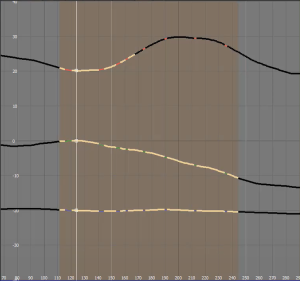
以下示例显示了需要平滑的轨迹曲线的图形视图。
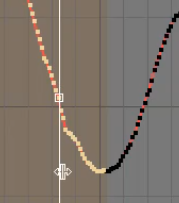
与平滑/输出清零,当滤波应用,曲线变得更平滑,但开始和结束不考虑是什么平滑部的任一侧上,从而导致在一条直线上,并在后面加上一个不希望的角.
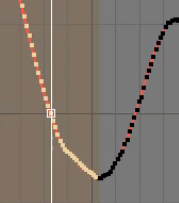
为轨迹的过滤部分提供更平滑的开始和结束:
在Marker Editing面板中,展开Filter部分并选择Smooth In/Out。
如果要更改间隙任一侧影响轨迹的程度,请编辑相邻字段的值。默认值为 0.2(20%)。平滑的工作原理是在平滑范围内逐渐或多或少地混合原始结果和过滤结果。
过滤后的部分在开始和结束时进行平滑处理。
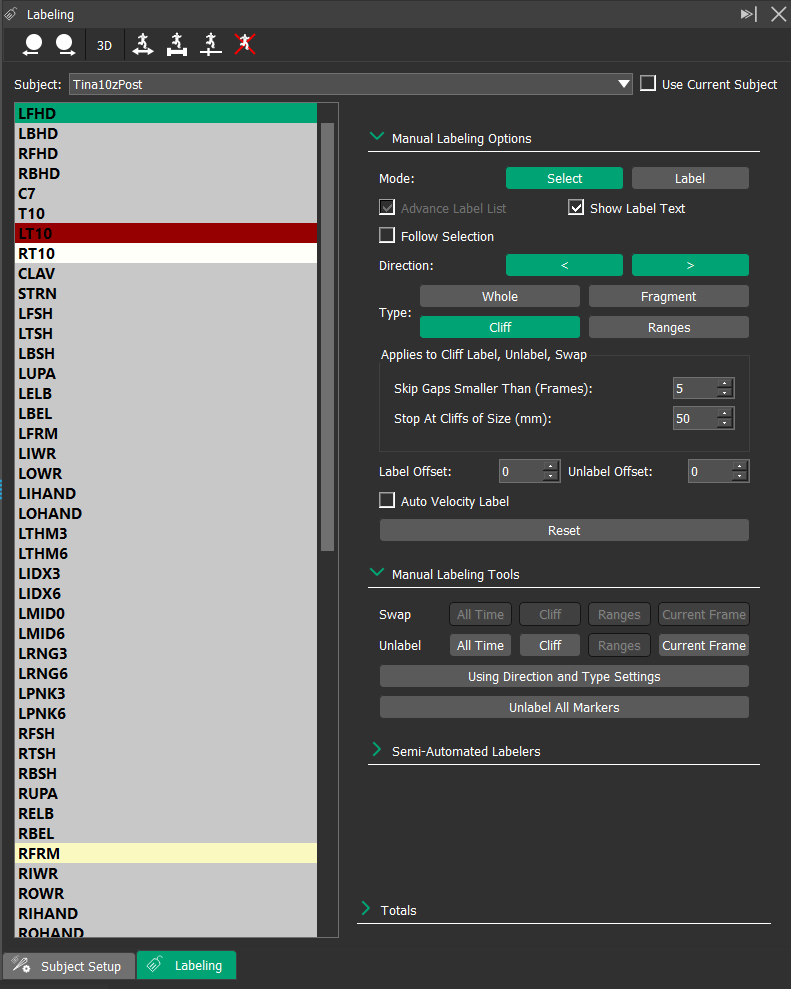
使用标签面板
您可以使用标签面板中的工具修复标签问题。以下步骤介绍了标签面板的主要组成部分。要直接查看如何使用它来修复标签问题的示例,要使用标签面板:
在功能区的处理选项卡上,单击标签。
在 Shogun Post 窗口顶部的工具栏中,确保在当前主题列表中选择了所需的主题。
在标签面板的左侧,显示所选主题的标签列表。颜色变化表示标记问题:
黄色:标签错误或缺少标签(颜色的深度表示问题的严重程度,例如,更多或更少的差距)
红色:当前帧中缺少此标记的标签
要显示当前主题的标签的 3D 表示,请单击"标签"面板顶部的3D按钮。3D 视图可帮助您快速确定标记的位置。您可以将标签从 3D 标签视图拖放到3D 场景视图窗格(反之亦然)。
您可以在 3D 视图中使用常用的鼠标操作(单击并拖动、右键单击并拖动、左键单击和右键单击并拖动),其方式与在3D 场景视图中相同。
在标签面板顶部的手动标签选项部分,选择模式选项(选择或标签),这会影响您选择和标记标记的方式。
选择在3D 场景视图中单击主题上的标记,然后单击标签面板列表中的标签名称。
标签单击标记列表中的标签名称,然后在3D 场景视图中的主题上单击所需的标记。
提示
要快速标记和选择模式之间切换标签的对象时,可以使用该复制了的功能的默认热键(L)标签和选择在顶部按钮标签面板。
在方向行中,选择向前标记
 (通过时间)或向后
(通过时间)或向后 您也可以同时选择两个选项(即,标记向前和向后),但为了帮助您避免混淆,至少在开始时,选择向后或向前并仅使用该选项。
您也可以同时选择两个选项(即,标记向前和向后),但为了帮助您避免混淆,至少在开始时,选择向后或向前并仅使用该选项。从类型选项中,选择应用标签的方式:
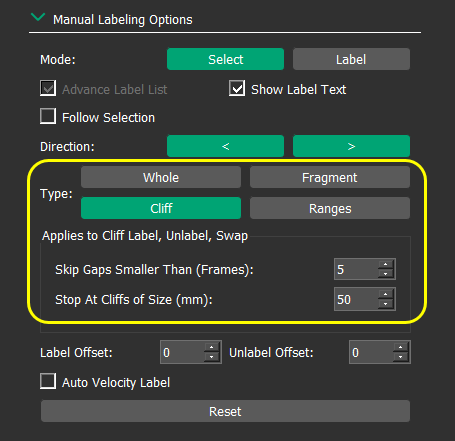
Whole标记整个轨迹。
Fragment标记截取当前帧的轨迹。
Cliff标记当前帧并继续直到遇到指定值,这将停止标记(例如,请参见标记面板中的以下文本,例如,默认是跳过小于 5 帧的间隙并在大于 5 帧的悬崖处停止标记) 50 毫米)。
范围允许您在图表或时间线上选择一个区域并仅标记选定的时间范围。
在标签面板中间的手动标签工具部分,您可以更正交换、取消标签信息和取消标签标记。
在该半自动贴标部分,可以访问速度贴标,这之后自动标示通常使用的,在部分标记服食。您可以使用它来更正标记,其中单个标记的路径由多个在时间上连续的轨迹组成,并且标记在其部分轨迹上未标记的位置之间存在小间隙。该速度标签当标记已被标记了一段时间,然后变为未标记时,该选项很有用,但在时间上向前或向后有多个轨迹,它们之间没有大的间隙并且都是相同的标记。它最适用于未标记轨迹与标记标记相距不多帧的情况,并且标记围绕标记标记末端和未标记轨迹起点的速度相当恒定。
修复常见的标签问题
以下基本过程只是您可以使用 Shogun Post 清理数据的几种方法。
- 识别问题
为帮助您识别问题,在3D 场景视图中,单击查看过滤器,并确保在场景部分中选择了缺失标记。还要确保在主题部分中选择了标签,并且在视图矩阵的L(abeling)列中选择了约束。
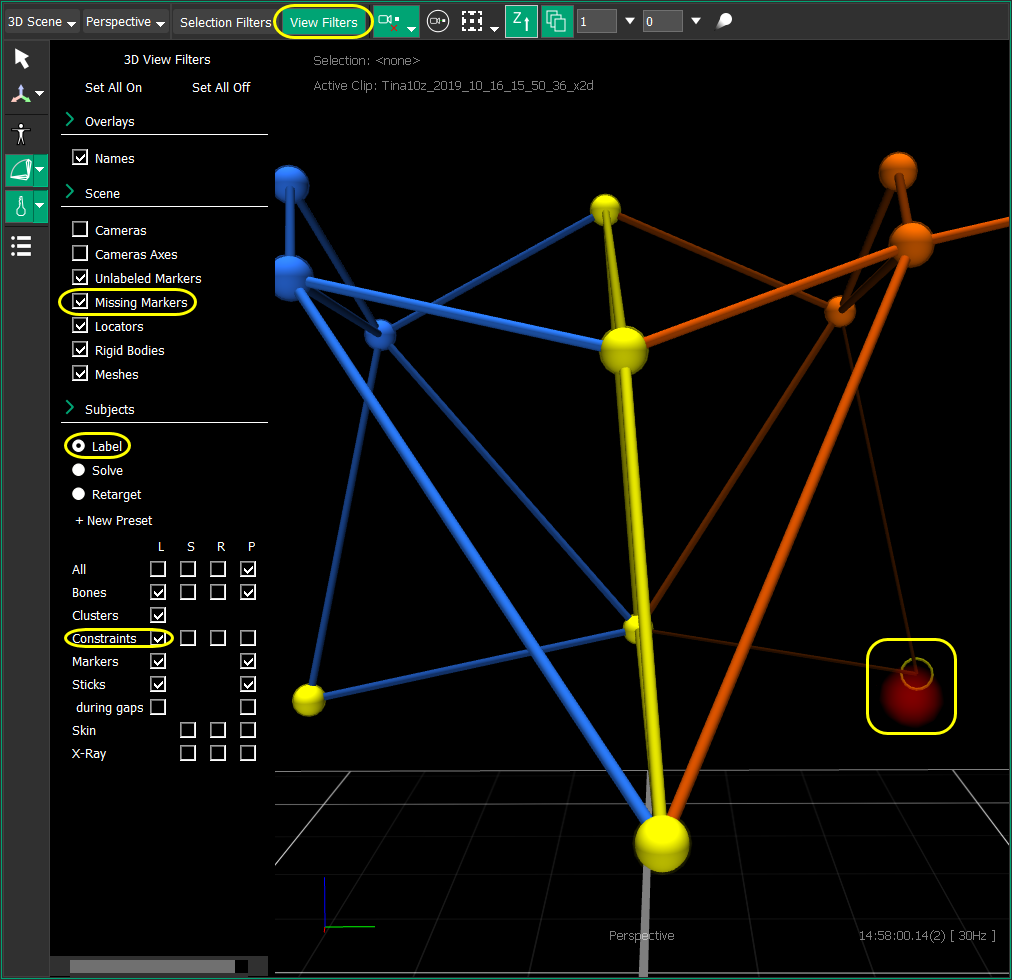
在3D 场景视图中,浏览整个镜头(沿时间线拖动当前时间指示器,或者为了更精细的控制,请按 A 或 S 键),注意标记可能被遮挡的时间(坐下、蹲下、对象交互、等等)。
在"标签"面板的标记列表中,注意任何丢失的(红色)标记并注意"弹出"或在3D 场景视图中移动。查找任何交换的标记
缺失的标记清晰可见,以红色突出显示。但是,在您识别出错误的标记之后,清除Missing Markers和Labeling Constraints可能有助于标记。
- 纠正交换
确保显示标签面板。
拆分3D 场景视图(在 Shogun Post 窗口的右上角,单击垂直拆分按钮
 ) 并在其中一个窗格中更改为图形视图,以便您现在可以看到3D 场景视图、图形视图和标签面板。
) 并在其中一个窗格中更改为图形视图,以便您现在可以看到3D 场景视图、图形视图和标签面板。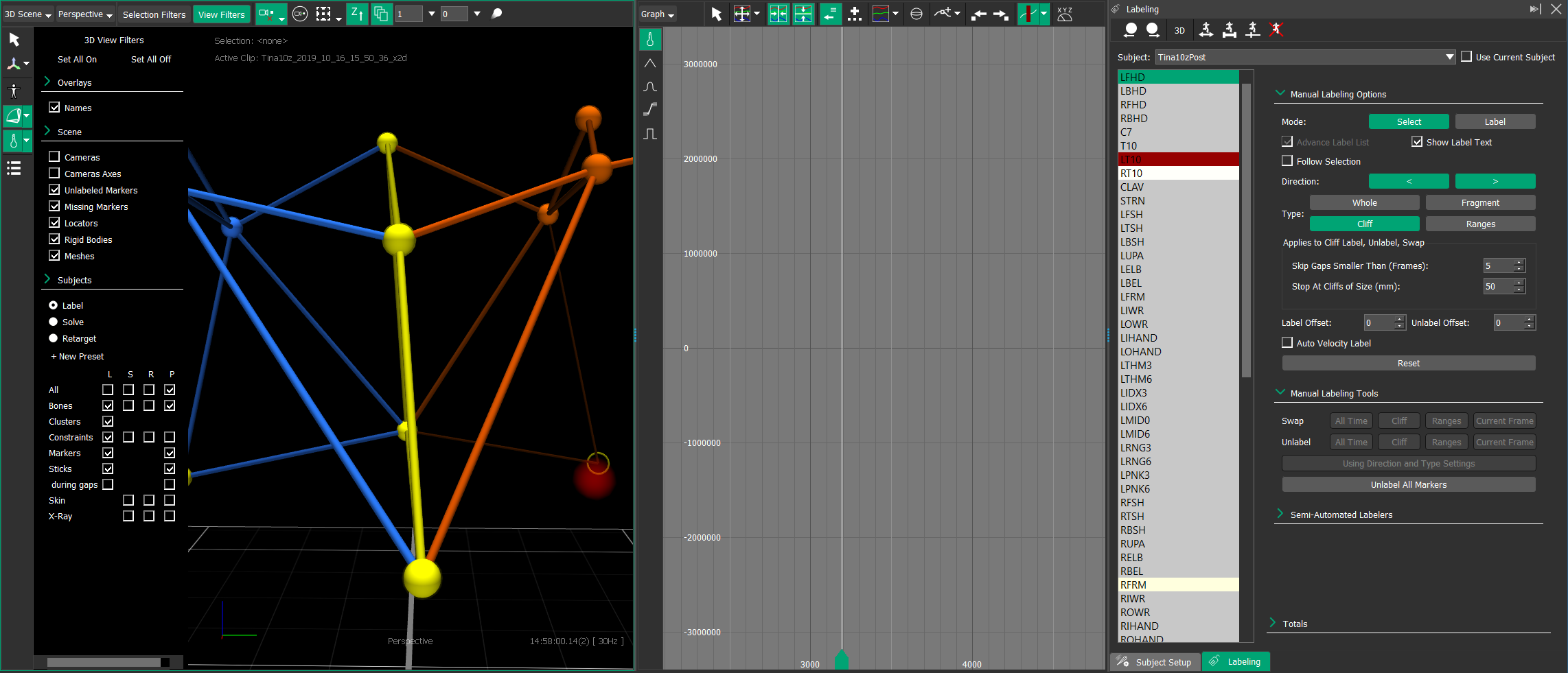
在Labeling面板中,确保选择了 Selectmode、Forward direction (>)和Cliff。
在3D 场景视图中,选择一个标记错误的标记,然后在图表视图中放大(右键单击并拖动)并转到发生交换的起点(这应该可以在图表上通过锐利的改变)。
根据标记在3D 场景视图中的位置,确定哪个标记是正确的,然后在 3D 视图中单击它。
在标记列表中,其名称以较粗的文本显示,并且在3D 场景视图的左上角,选择文本显示所选标记的名称。
在3D 场景视图中单击错误标记的标记,然后在"标记"面板列表中单击正确的标记名称。
标记现在已正确标记。要检查,请在3D 场景视图中前后滑动,并检查标记现在是否正常运行。
但是,您现在有一个以前错误标记的标记,从现在开始未标记。
- 为未标记点标记正确位置
在3D 场景视图中,单击未标记的标记以将其选中。来回擦洗以识别正确标记的位置。这是它在3D 场景视图和标签面板标记列表中正确着色的点。您还可以在Graph上观察到这一点。
要使用标签面板中的工具标记标记,请根据您选择的模式执行以下操作之一:
如果您更喜欢使用标签模式进行标记:
a. 在手动标注选项部分的模式行中,单击标注。
b. 在标签面板的标记列表中,单击标记的名称,然后在3D 场景视图中,单击当前未标记的标记。或者,如果您更喜欢通过拖动来标记,请使用选择模式:
a. 在手动标签选项部分的模式行中,确保选择了选择模式。
b. 在标签面板中,单击以在3D视图中选择所需的标记。
c. SHIFT+CTRL 然后单击并从"标签"面板中的选定标记拖动到3D 场景视图中的未标记标记。
和以前一样,要检查标签,请在3D 场景视图中前后滑动并检查标记现在是否正确运行。
更正任何掉期后,您可能需要使用 Shogun Post 的诊断工具来帮助识别差距
- 查看和选择间隙
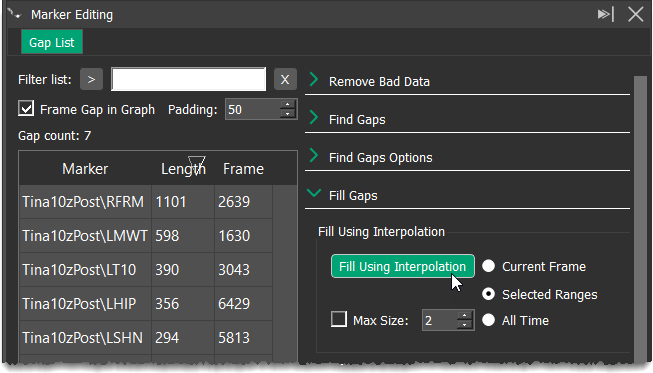
您可以在"标记编辑"面板的"填充间隙"部分中通过查看间隙列表来查看场景中的所有间隙。(如果您看不到列表,请在"标记编辑"面板顶部,单击"间隙列表"按钮。)

为了更容易地找到最长的间隙,单击长度列标题重新排列列表,最长的间隙在顶部。
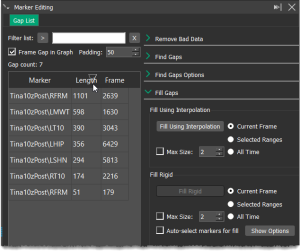
当您在列表中选择一个间隙时,它会自动显示在图表视图中,您可以对其进行编辑。
然后,您可以决定填补空白的最佳方法:
第一步,尝试自动填充尽可能多的间隙。
如果您的场景在使用自动填充后仍然包含间隙,或者自动填充不适合,请尝试手动填充间隙
- 自动填充智能刚性填充
Shogun Post 使您能够使用刚性填充操作自动填充间隙。这会查看场景中的所有标记,然后将它们与您尝试填充的标记进行比较。然后它使用类似移动标记的组合来填补空白。最后,它检查填充以确保它看起来正确,如果不正确,它会选择另一组标记。
此过程也可通过脚本实现,使用 selectMarkersForRigidFill 命令选择标记并使用 autoFillGaps 命令填充它们。
要自动填充选定的标记:
以下用于刚性间隙填充的过程是半自动的,您可以为填充选择一个标记:
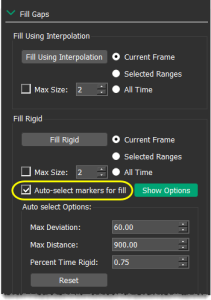
在"标记编辑"面板中,展开"填充间隙"部分,然后在"刚性填充"区域中,选中"自动选择填充标记"复选框。
要更改自动选择的默认选项,请单击复选框旁边的显示选项按钮。选项是:a. 最大偏差:以毫米为单位指定用于填充的标记集必须有多硬,作为集内所有对之间距离的最大偏差。例如,值为 60 可使标记的刚度弯曲 6 厘米。
b. 最大距离:以毫米为单位指定候选者距离选定标记的距离。默认值 900 略低于 3 英尺 (1 m),因为更大的距离可能是另一个主体或身体部位,在间隙期间不太可能刚性移动。
c. Percent Time Rigid:指定所选标记必须与所选集保持刚性的相邻片段范围内的时间百分比。默认值 0.75 表示 75% 的时间。
选择一个有间隙的标记。
确保当前时间在间隙中。
单击填充刚性。
使用智能刚性填充来填充间隙。
要自动填充选定的标记或所有标记:
除了上述半自动程序外,您还可以自动填充所有标记上的所有空白,或仅填充当前选定的空白。去做这个:
根据您要填充的标记:
a. 仅选定标记。确保您选择了所需的标记。
b. 所有标记。确保未选择任何标记。
在Marker Editing面板中,展开 Fill Gaps 部分,然后在Fill Rigid区域中,选择Current Frame、Selected Ranges或All Time选项。
选择自动选择标记进行填充并确保选项符合要求(见上文)。
单击填充刚性。
选定标记上的所有间隙,或者如果未选择标记,则所有标记上的所有间隙都将在播放范围或选定范围内填充。
请注意,在所有标记的情况下,仅填充标记的标记,但可以自动选择未标记的标记来填充标记的标记。注意
运行自动间隙填充后,如果 Shogun 没有根据设置找到一组刚性标记,您可能会发现并非所有间隙都被填充。您可以手动填充剩余的间隙,也可以尝试更改设置,特别是通过增加默认值的最大偏差。
您可以多次运行自动间隙填充以获得所需的结果,尤其是在以下情况下:
第一次运行后,它要么进行了不需要的填充,要么由于贴错标签而无法填充间隙。修复错误标签,然后再次运行以填补剩余的空白。
第一次运行后,它要么进行了不需要的填充,要么由于间隙太复杂而无法填充。手动填充间隙,然后再次运行自动间隙填充以填充任何剩余的间隙。由于有更多数据可用,现在可以填充这些内容。
第一次运行后,仍然存在一些差距。松开刚性设置(参见上面的注释)并再次运行。
- 手动填补空白
您可以使用Marker Editing面板来填补空白,通常与Data Health视图和/或Graph视图结合使用。该标记编辑面板包含了所有必要的,填补空白,更改轨迹键工具和过滤数据。
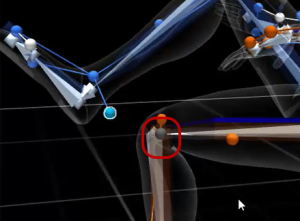
例如,您可能首先注意到时间条问题地图上的显示有一个间隙,然后注意3D 场景视图中哪个标记受到影响:
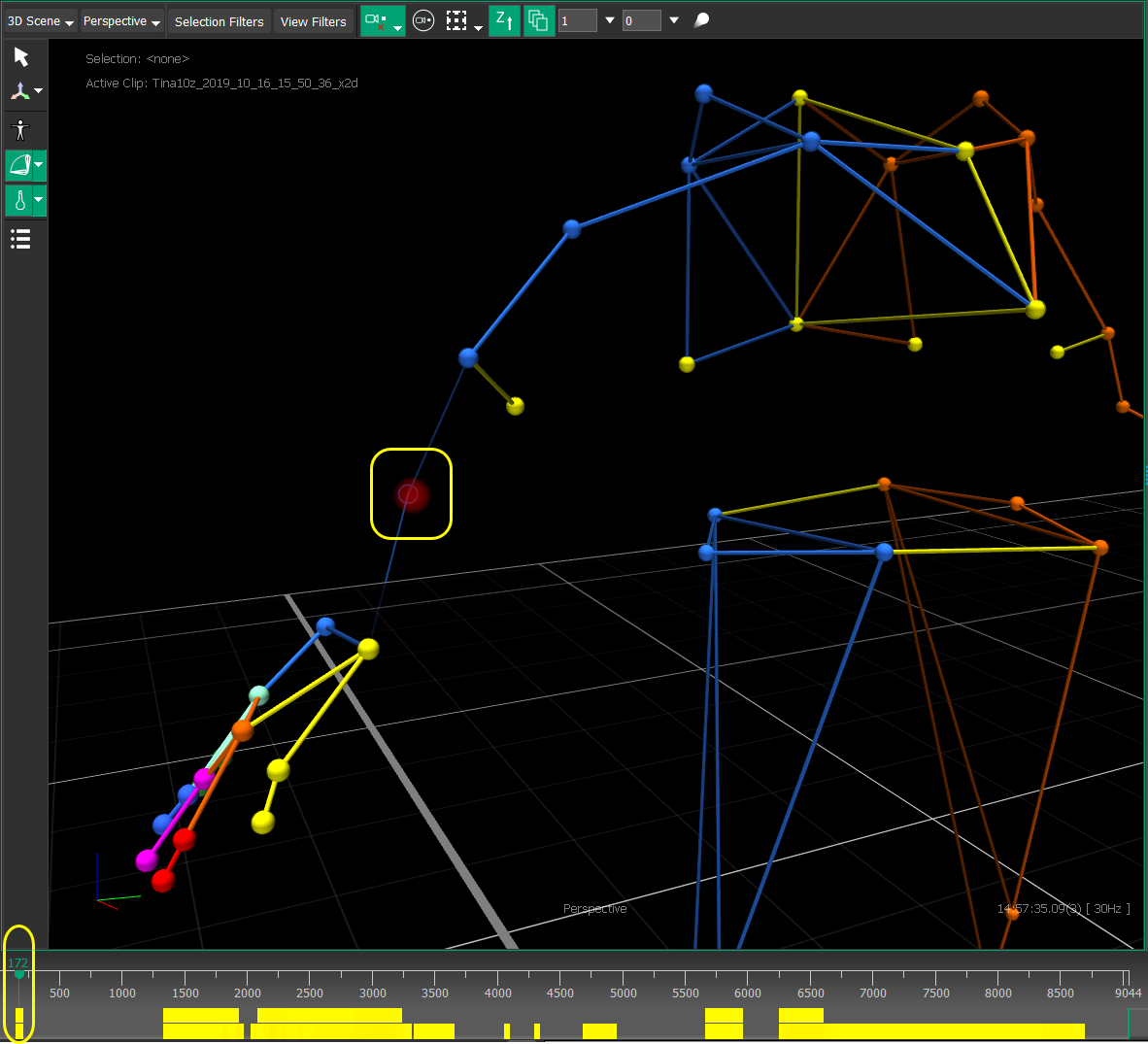
要快速填充所选标记,请在时间栏上双击以将当前时间指示器移动到相关帧。
受影响的标记会在3D 场景视图中自动突出显示(您可以右键单击并拖动以进一步放大以检查标记)。要打开数据运行状况视图和图形视图以及3D 场景视图,请通过单击向左拆分三个视图按钮来拆分屏幕
并更改新窗格中的视图。如果标记编辑面板尚未打开,请在功能区的处理选项卡上,单击标记编辑。
在Data Health视图中,找到相关标记的线,该线显示代表间隙的灰色矩形。
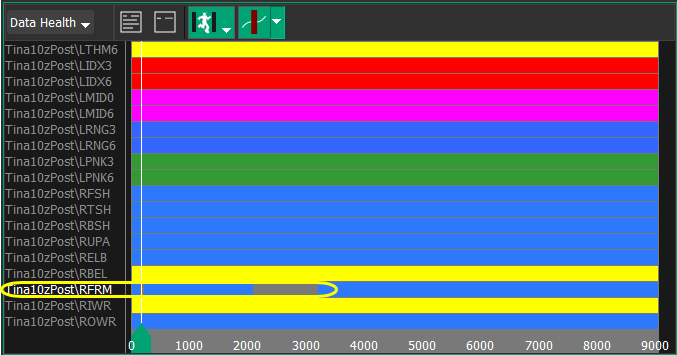
在"数据运行状况"视图中,双击以选择间隙范围。
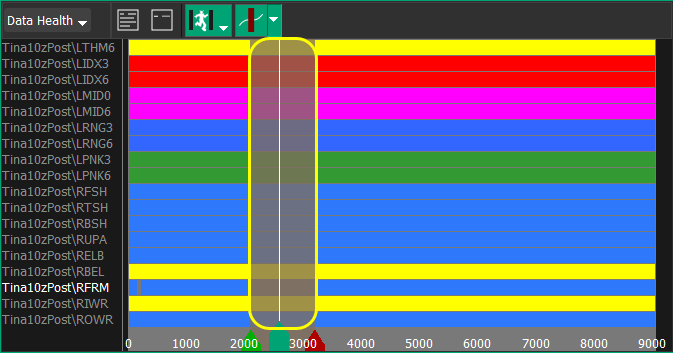
在"标记编辑"面板中,展开"填充间隙"部分。在Fill Using Interpolation区域中,选择Selected Ranges(仅填充当前选择),然后单击Fill Using Interpolation。
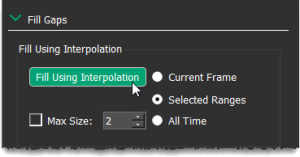
这会查看间隙两侧的键,并通过在它们之间进行插值来填充它。它适用于小间隙。
在3D 场景视图和图形视图中,检查您的填充是否已提供所需的结果。
如果填充没有给出适当的结果,您可以单击快速访问工具栏上的撤消
 ,并在"标记编辑"面板中尝试其他间隙填充选项。
,并在"标记编辑"面板中尝试其他间隙填充选项。
- 手动间隙填充选项
短间隙
a. 通过在图形视图或数据健康视图中双击手动选择一个短间隙,然后在标记编辑面板中,展开填充间隙部分并单击使用插值填充。这会查看间隙前后的数据,并使用样条填充在它们之间进行插值。
b. 检查结果在3D 场景视图和图形视图中是否合理。
短间隙序列
a. 对于一系列带有平滑线穿过图形视图中的间隙的小间隙,按住 ALT 键并拖动以选择受影响的数据。
b. 在使用插值填充区域中,选择选定范围,然后单击使用插值填充。
非线性运动
例如,对于涉及旋转运动的非线性运动,由于插值不考虑这种运动,因此需要不同的方法。如果缺少的标记是刚性标记集的一部分(即,彼此之间保持相同的关系,例如骨盆),您可以在刚性对象中使用三个或更多标记(除了标记之外的三个)建议有间隙)以帮助填写缺失标记的数据。
a. 要选择间隙范围,请在图形视图或数据健康视图中双击,然后选择(CTRL+单击)刚性对象中的其他三个标记。
b. 在"标记编辑"面板中,展开"填充间隙"部分。
c. 在填充刚性区域中,选择选定范围并单击填充刚性。
当前标记的图案被复制到丢失的标记上。d. 像往常一样,检查Graph视图和3D Scene视图中的填充看起来是否合理。
您可以在默认标记集中使用的其他刚性对象包括手、前臂、上臂、肩膀、胸部和头部。
- 无法进行刚性填充的非线性运动
如果运动是非线性的,但由于所有相关标记都不存在而无法进行刚性填充,您可以使用使用约束填充选项。这使用标签或求解骨架来生成填充。它需要存在一个骨架,骨架受标记约束,并且需要足够的标记来拥有求解相当好的数据。被填充的标记必须被约束到骨架,因为约束偏移用于确定在填充期间标记应该在哪里。
在使用这种类型的填充之前,请检查骨骼和缺失的标记(默认情况下在3D 场景视图中显示为红色)是否位于合理的位置。
- 清理期间的处理
请注意,前面修复数据问题的步骤假设您现有的 .mcp数据在很大程度上具有可接受的质量。但是,在某些情况下(例如,当您尝试生成质量更好的数据时),而不是坚持尝试修复有问题的 .mcp文件,您可能需要清除场景并从 .x2d文件,或者先取消所有数据的标签。在这种情况下,不要只打开"处理"面板并单击"重建"或"标记"或运行其他组合处理操作,因为这不会解决基础数据的问题。
- 清除现有的数据
要删除所有未标记的数据并清除现有的标签和求解,请在"处理"面板顶部选中"重置场景"复选框。然后您可以运行Reconstruct等。请注意,您无法撤消重置。
要从当前文件中删除现有标签,请在"处理"面板的"标签"选项卡上,选择"清除现有标签",然后根据需要运行"标签"。
要从数据中删除遮挡修复,请在"标记编辑"面板中,展开"恢复"部分并选择所需选项。
在清理期间的解决
在清理操作过程中,每次清理完一个范围后,检查它的solve。去做这个:
a. 确保选择了您清理的范围。
b. 在功能区的处理选项卡上,单击求解按钮上的箭头。
c. 单击求解求解范围。
选定的范围已解决,使您能够快速检查您的清理是否成功,而无需解决整个拍摄。d. 继续清理包含错误标签、间隙或嘈杂标记等的下一个范围。
完成所需的所有清理工作后,请解决整个镜头。
解决数据与导出
完成任何必要的数据清理后,运行最终求解以生成准备导出的完成文件。
即使您只需要清理单个帧或一小部分帧,也要始终在整个播放范围内运行最终解决方案。您可以在较小的范围内运行求解,以便您可以在工作时查看清理结果(根据您的要求,您可能会使用功能区或处理面板上的求解标记和/或求解求解选项),但是为了避免在求解范围的开始和结束处出现任何跳跃,当您完成编辑后,您必须运行整个播放范围的求解。
要解决您的数据:
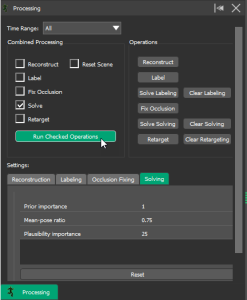
在功能区的处理选项卡上,单击处理。
在Processing面板的顶部,确保从Time Range列表中选择了所需的选项(例如,要影响整个播放范围,请选择All,如下图所示)。
在Processing面板中,确保Reconstruct、Label和Fix Occlusion的选项被清除,但选择了Solve。
在求解选项卡上,确保设置符合要求。
如果您使用任何高保真手指模板:
确保合理性重要性选项设置为合适的值。默认值 25 通常是一个很好的起点。较小的值产生更好的数据保真度(即,标记将更好地适应其约束),但姿势可能性可能更弱。较大的值会产生更好的姿势可能性,但数据保真度较弱。
请注意,影响整个骨架的平均姿势比对最终的手部姿势有很大影响。默认值 0.75 通常是一个不错的起点,但如果您需要调整它(例如,如果噪点太多),请尝试使用较低的值。
单击运行检查的操作。
您对标签骨架和求解骨架所做的任何更改都包含在此最终求解中。
查看您解决的数据并执行任何需要的进一步清理。
从Shogun Post导出
当您对数据质量感到满意时,您可以将其从 Shogun Post 以适合您所选动画软件的格式导出。
如果要导出到 FBX,为确保选择合适的帧速率,另请参阅FBX 文件格式支持的帧速率。
要导出片段:
如果您只想导出镜头的特定方面(例如骨骼),请以您喜欢的方式选择它们(例如,在"选择"面板中,或使用3D 场景视图中的"选择过滤器"选项等)。
要指定导出所需的选项,请在"常规"菜单上单击"首选项",然后在"首选项"对话框中单击"文件导出"选项卡。
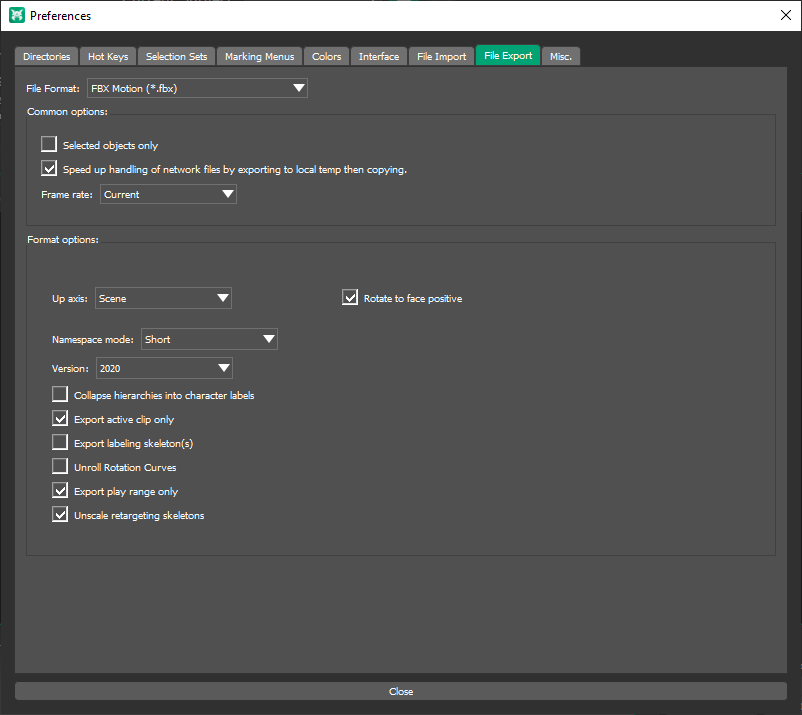
选择所需的导出文件格式,如果您在步骤 1 中选择了导出,请确保选中仅选定对象框。选择所需的任何其他选项,例如适当的帧速率(对于 FBX,请参阅FBX 文件格式支持的帧速率),然后单击关闭。
在文件菜单上,单击导出。
在"导出"对话框中,如有必要,更改导出位置并输入导出文件的名称。
选择适当的文件类型(例如 FBX)。
单击保存将文件导出到指定位置。
FBX 文件格式支持的帧率
以下是 FBX 文件格式支持的帧速率,因此是唯一可以从 Vicon Post 导出为该格式的帧速率。
120 帧/秒
100 帧/秒
60 帧/秒
50 帧/秒
48 帧/秒
30 fps(黑白 NTSC)
30 fps(在 MotionBuilder 中选择按帧显示时使用,相当于 NTSC drop)
~29.97 fps(降色 NTSC)
~29.97 fps(彩色 NTSC)
25 帧/秒(PAL/SECAM)
24 fps(电影/电影)
1000 毫/秒(用于日期时间)
~23.976 帧/秒
96 帧/秒
72 帧/秒
~59.94 帧/秒
119.88 fps(需要自定义 MotionBuilder 版本)
审核标准
修复完成后的肢体动作是完整性的,不允许扭曲、翻腕出现
在修复后的数据没有掉帧、卡顿现象
在修复后播放一遍数据流畅度
输出标准
输出数据的朝向为Y轴朝上
只导出数据骨架FBX格式,点位和摄像机不需要被导出
输出路径为:\\10.168.30.9\qita\TempNO1\To动捕\TVN数据
需要附带场记视频、场记表
数据广播录制时,不允许数据卡顿出现
引擎录制动画工作流程
本章节介绍Vicon数据实时输入引擎,通过镜头试拍记录器与定序器记录动作捕捉的方式。
Moionbuilder
使用Vicon插件与Motionbuilder的数据连接
下载Vicon_MotionBuilder_2022_StreamPlugin_1.0.1.132306.zip插件并将zip文件解压缩到您的计算机
双击运行ViconMotionbuilderSimpleStream_x64
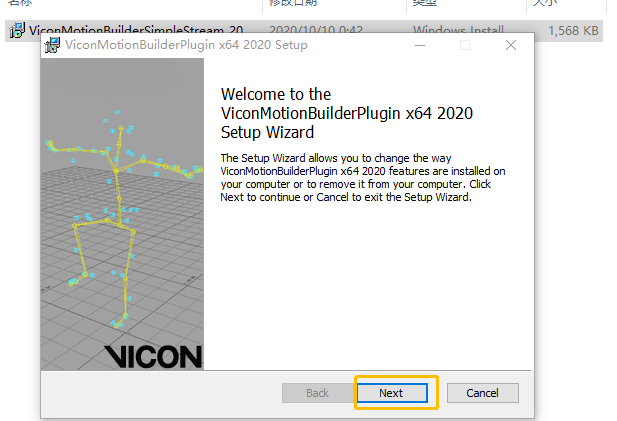
设别Motionbuilder软件版本,下一步安装完成
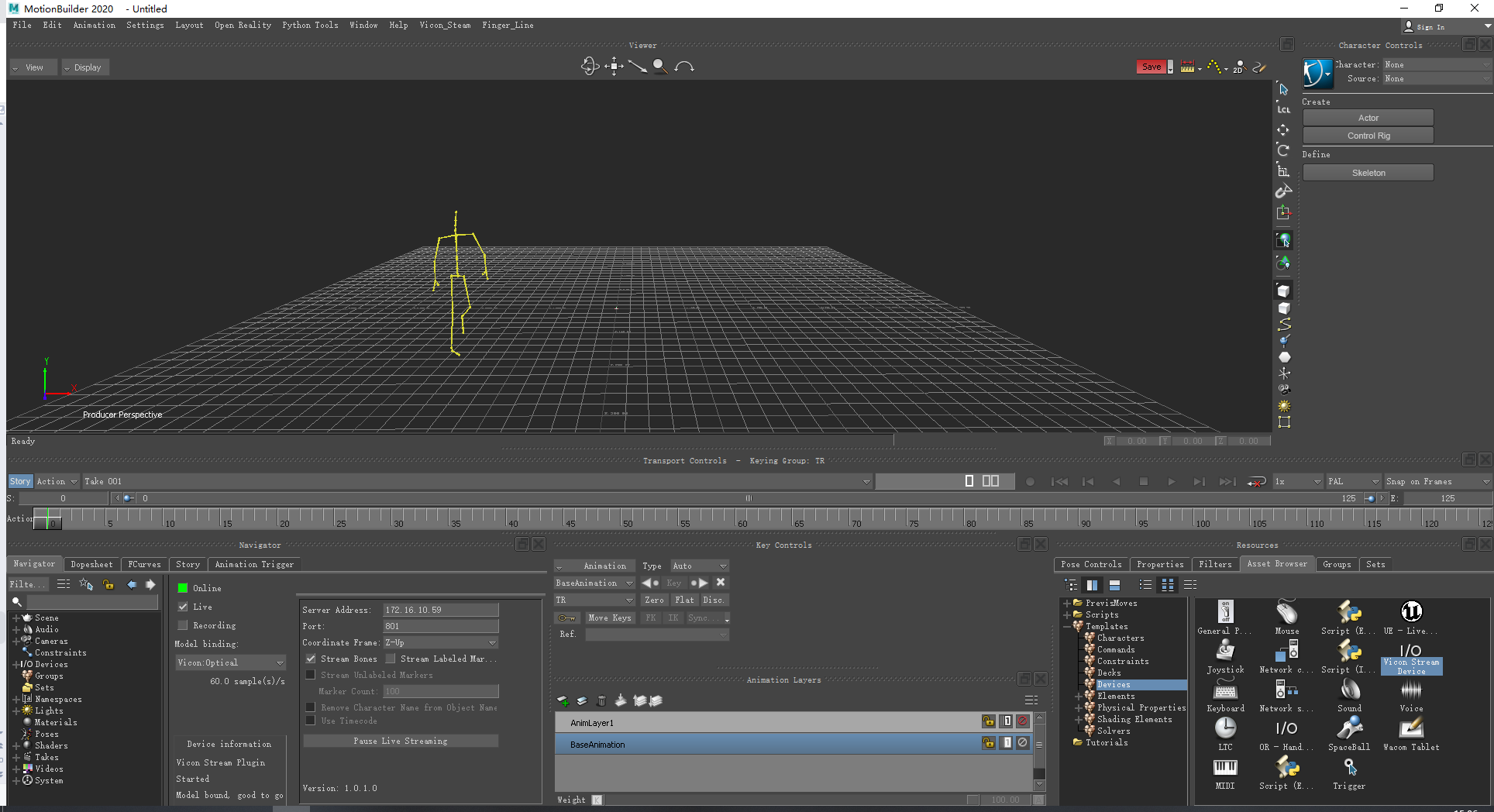
启动Motionbuilder,在资源浏览器(Asset Browser)中的设备(Devices)下,您现在可看到
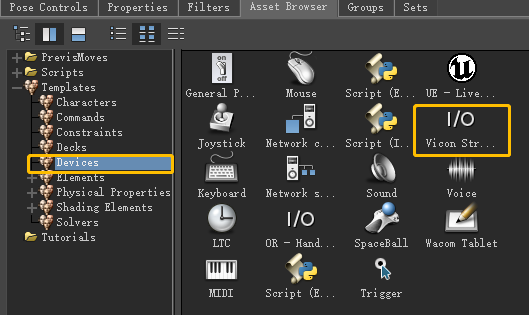
拖拽ViconStream到场景中
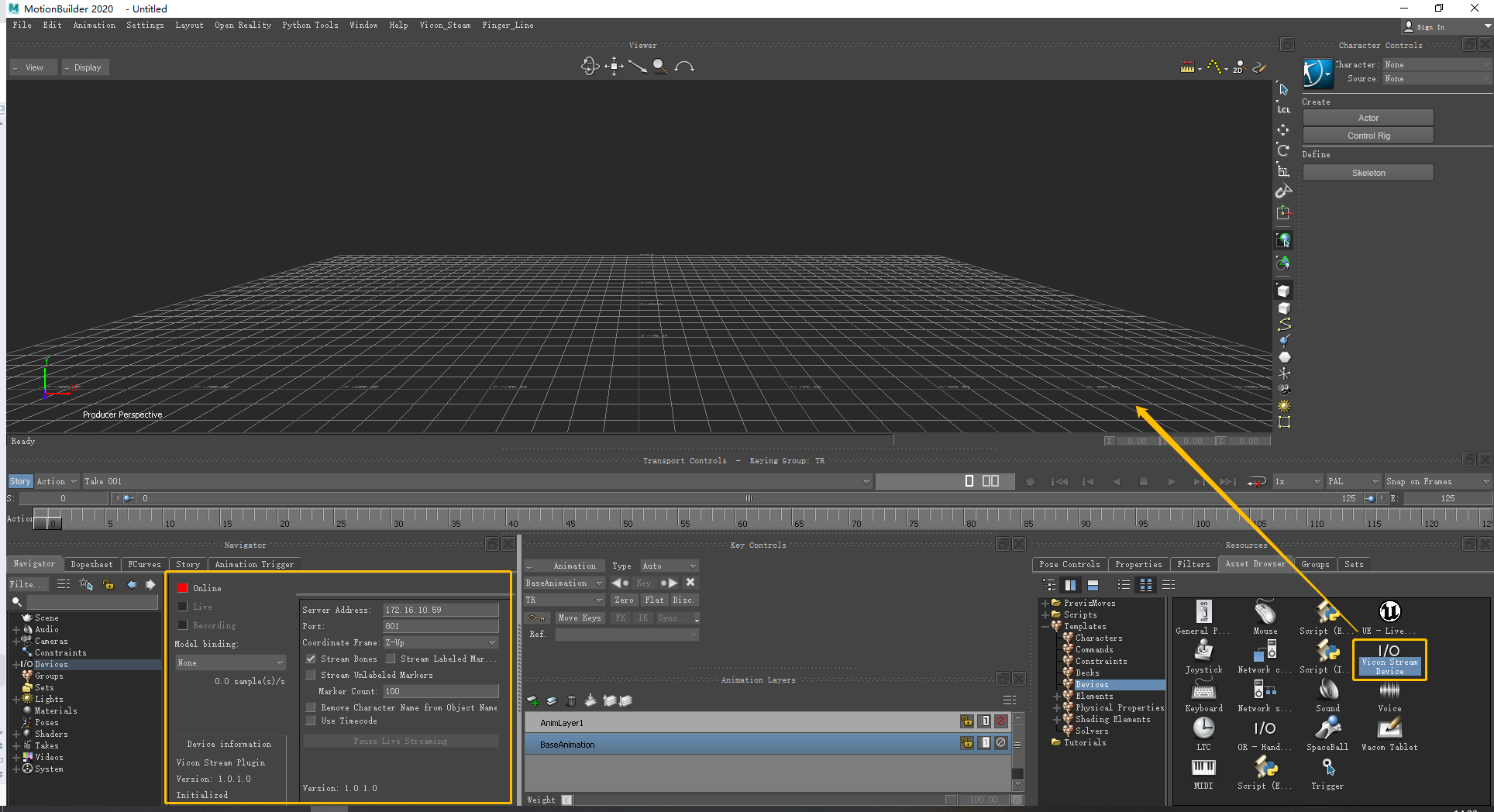
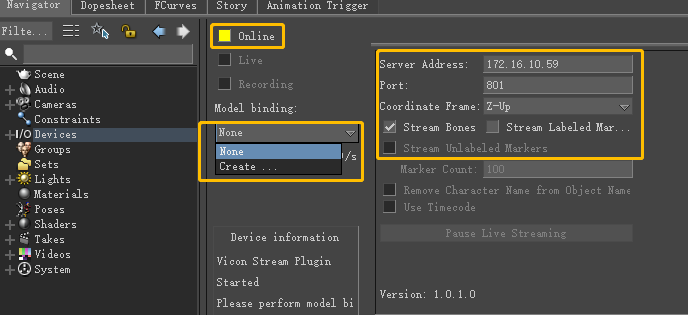
启动ViconStream插件
填写IP地址与端口号
单击Online
选择模式
如下图:
运行结果
使用Motionbuilder插件与UE4的数据连接
下载Motionbuilder插件并将zip文件解压缩到您的计算机。
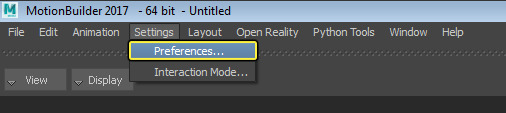
在Motionbuilder内的设置(Settings)下,选择首选项...(Preferences...)
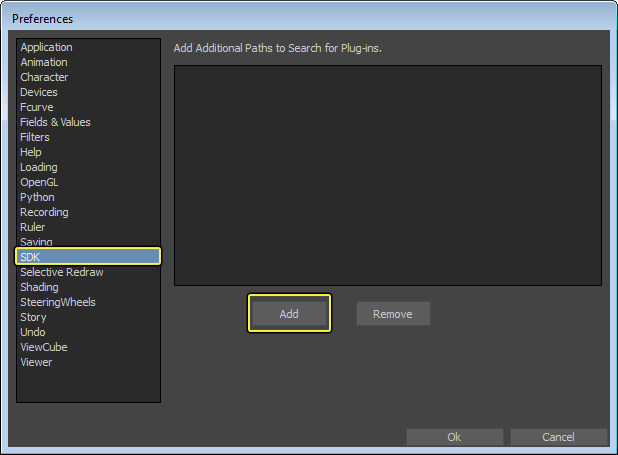
在SDK下,单击添加(Add)按钮并指向已解压缩的文件夹路径和您的Motionbuilder版本。
一旦在窗口中看到路径,单击确定(Ok)。
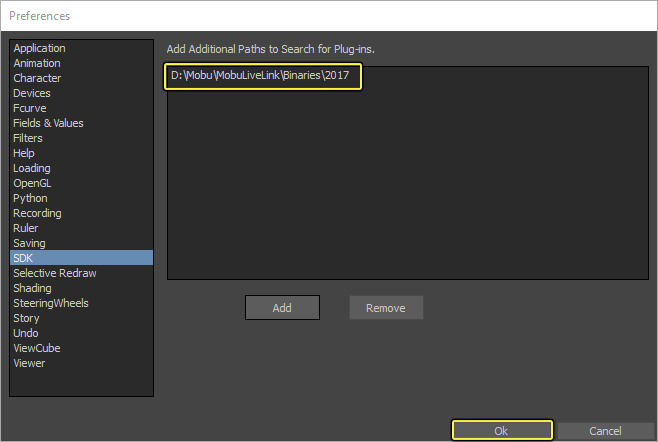
在确认窗口上,单击确定(Ok),然后重启Motionbuilder使更改生效。
在资源浏览器(Asset Browser)中的设备(Devices)下,您现在可看到UE - LiveLink资源。
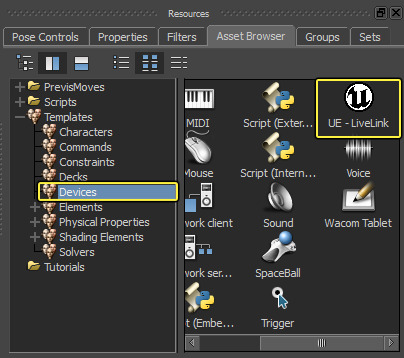
这使您可以定义您想要从场景中流送到UE4的内容
导入模型
打开Live Link连接(Live Link Connection)窗口,您可在设备(Devices)部分下找到该窗口。
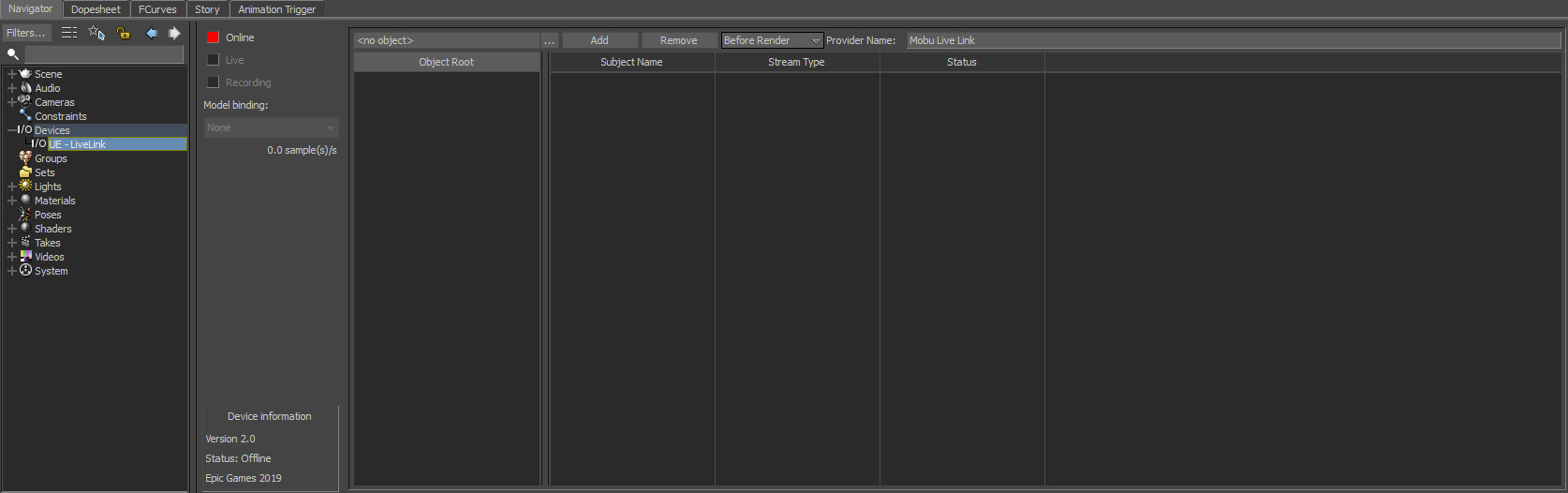
在连接(Connection)窗口中单击...(选择器)按钮,并选择根(Root)骨骼和摄像机(Camera),然后单击添加(Add)按钮。
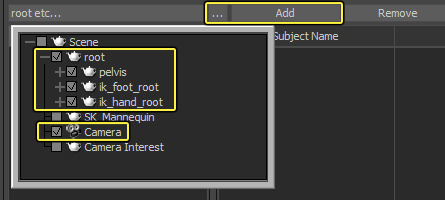
这将把这两者添加为主题,以流送到UE4。注意,将根据您正在试图流送的内容自动检测流类型。
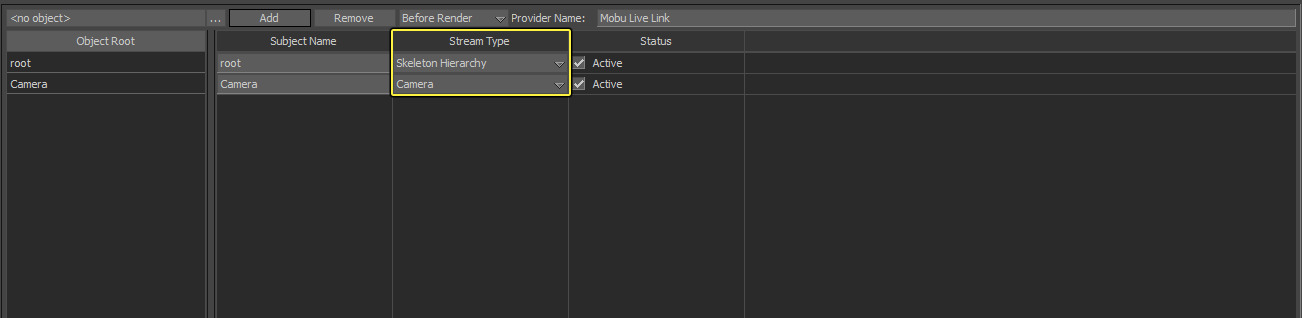
主题名称(Subject Name)是它将在UE4中显示的名称。
流类型(Stream Type)是发送的数据类型。
状态(Status)是主题是否处于活动状态,可进行流动。
在根(Root)对象的主题名称(Subject Name)字段中,将来自根(Root)的名称更改为角色(Character)。

单击在线(Online)旁的按钮启用内容流送。
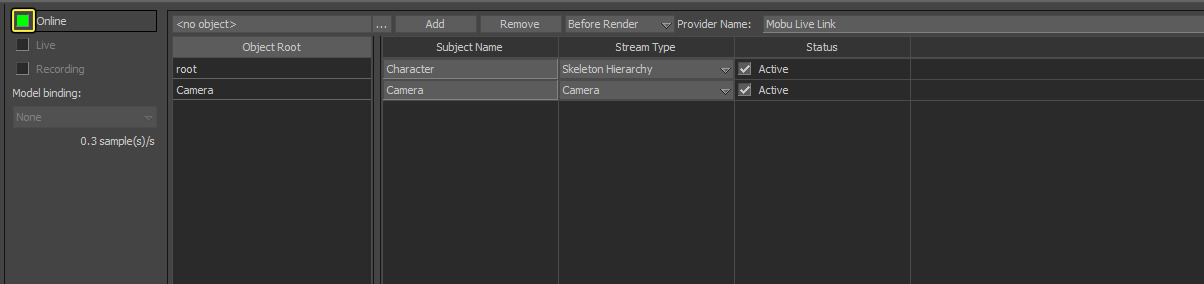
在线状态(Online status)按钮将从红色(离线)更改为绿色(在线)。
在导航器(Navigator)窗口系统(System)下,启用始终刷新查看器(Always refresh viewer)选项。
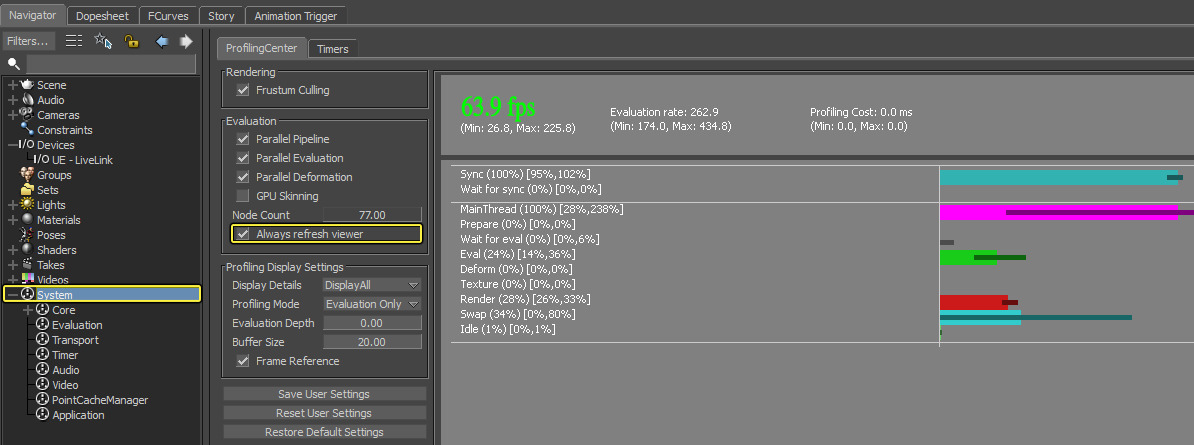
当您在使用Live Link流送内容时,您将需要启用此选项,因为当Motionbuilder变成后台应用程序时将导致失去焦点,造成性能限制,最后引起流送过程卡顿。
模型角色化处理
本节是提供Vicon实时数据进入Motionbuilder之后,驱动模型肢体动作的操作方式
按Ctrl+F进入前视图窗口
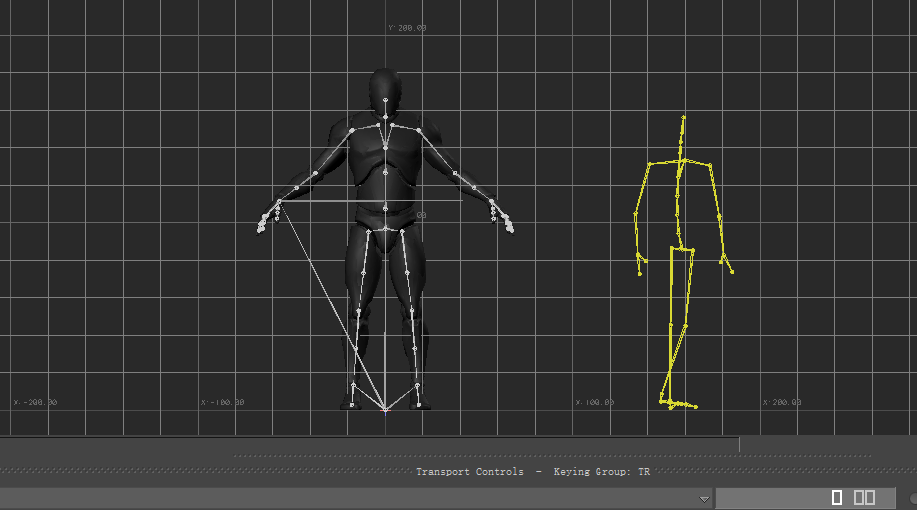
把模型骨骼通过旋转方式摆T-pose状态
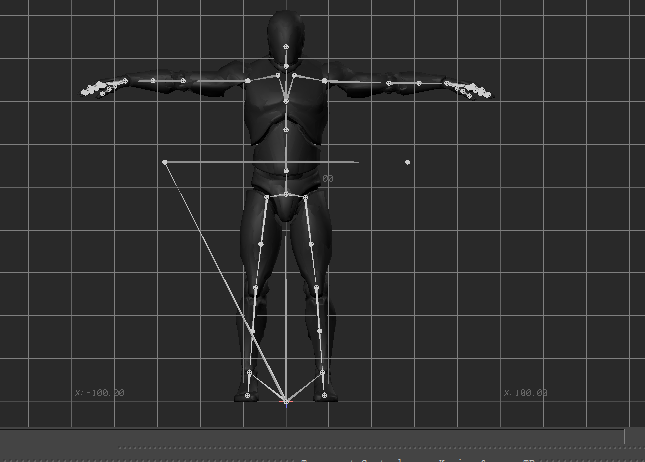
在Motionbuilder左上角Character Controlsz列表,单击Skeleton创建模板
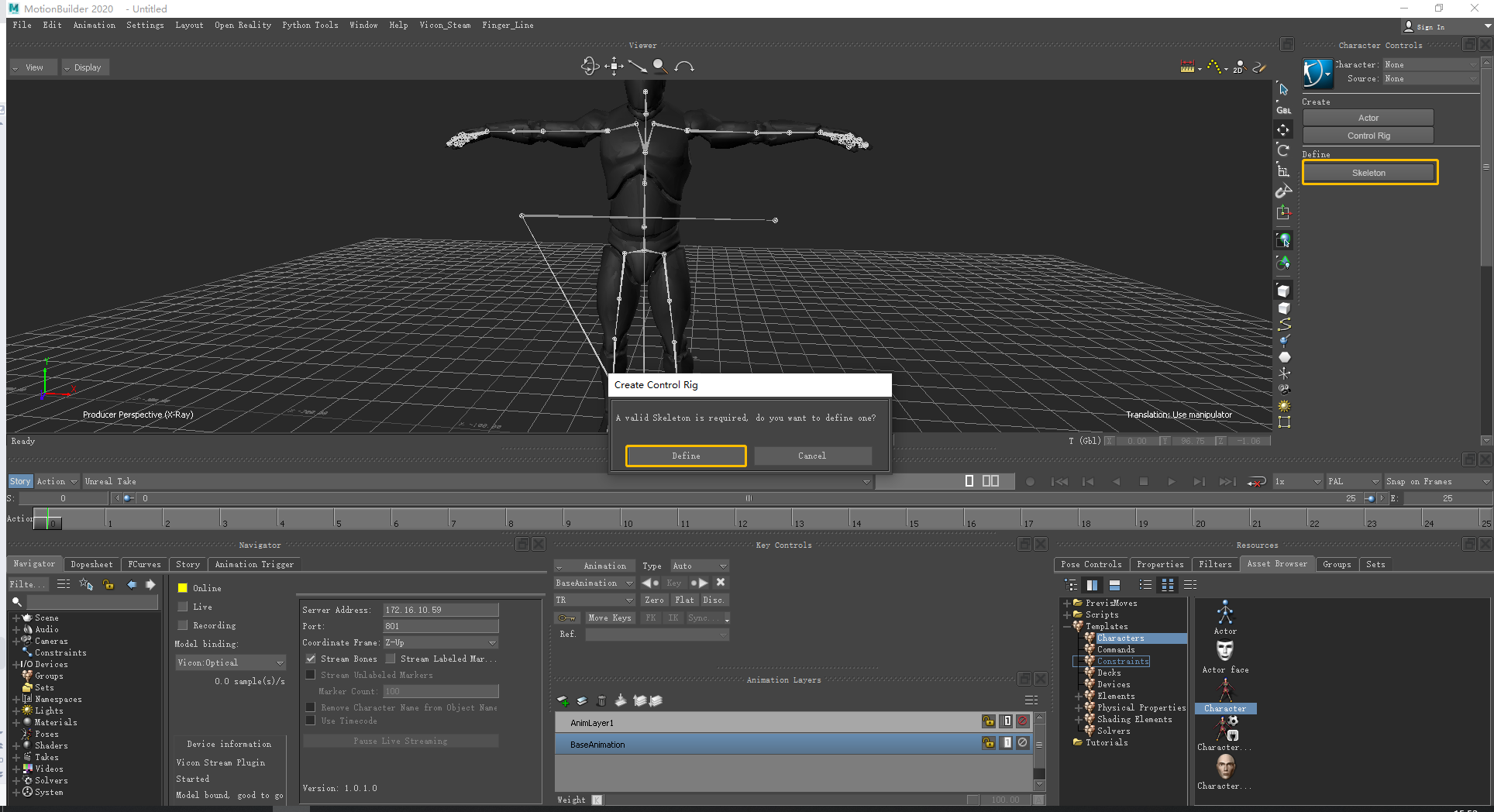
根据视图空白处,双击对应的骨骼
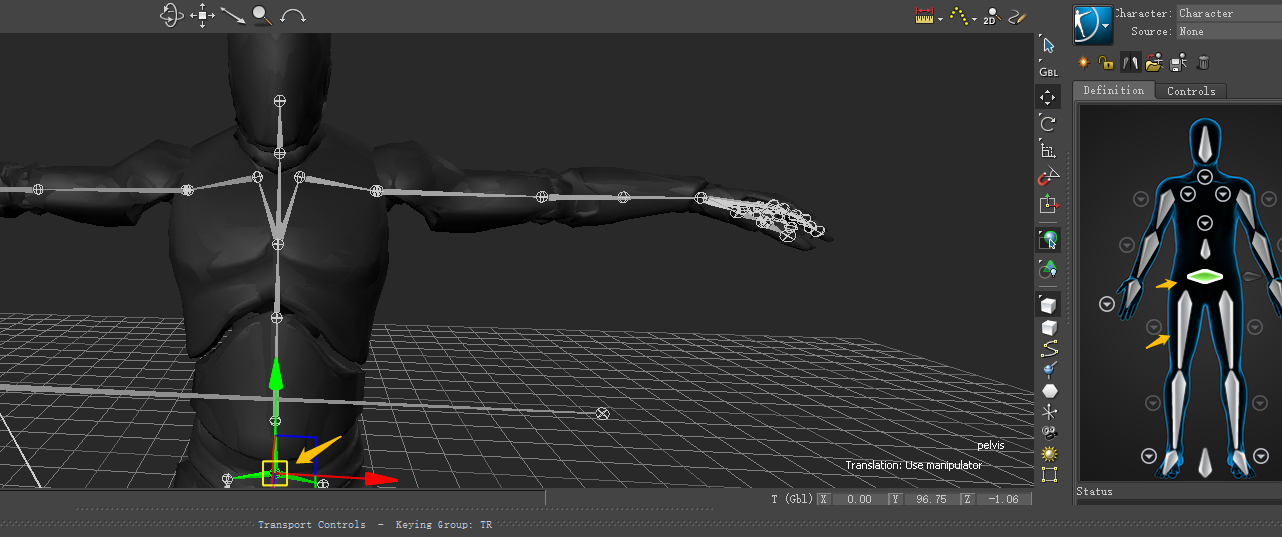
配置好对应骨骼后点击
 锁住
锁住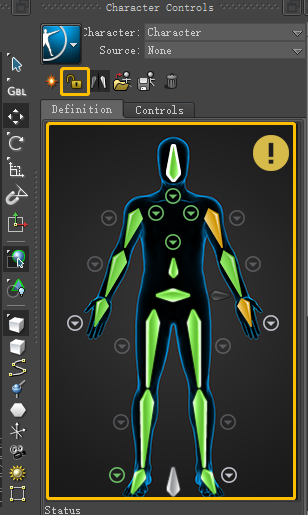
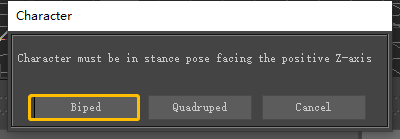
点击Biped
在Character Controls栏Character处匹配数据
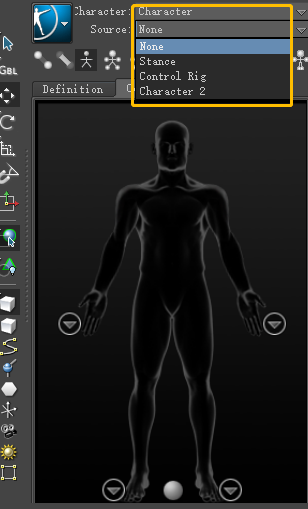
Character(模型)
Source(数据)
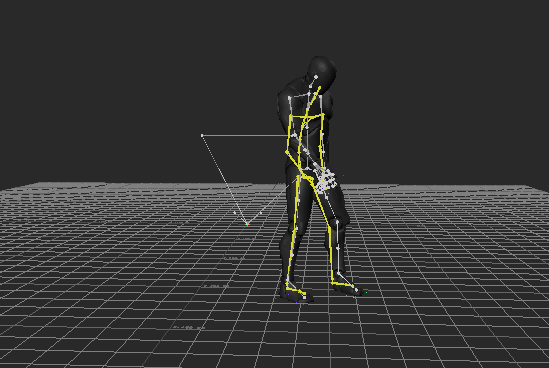
完成匹配
虚幻引擎
使用Live Link获取与Motionbuilder的数据连接
当Mobu在后台运行时,在UE4内,从文件(File)菜单的窗口(Window)下,选择Live Link(Live Link)。
这将打开Live Link流送管理器(Live Link Streaming Manager),使您能够连接到正在运行的Motionbuilder实例。
单击添加源(+ Source)按钮,然后在消息总线源(Message Bus Source)下,选择您的Mobu实例并单击确定(Ok)。
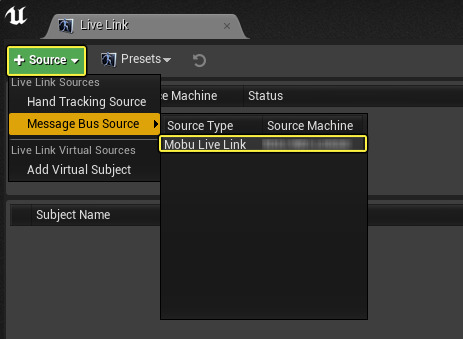
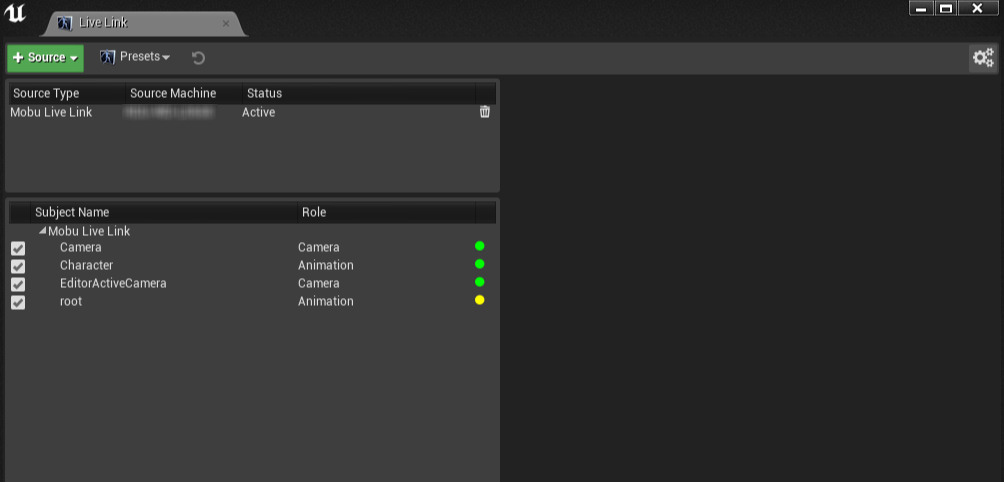
流送管理器将更新,以显示正在流送到UE4的已连接源类型和主题。
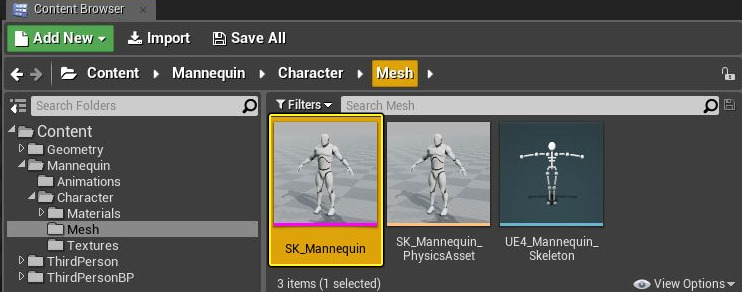
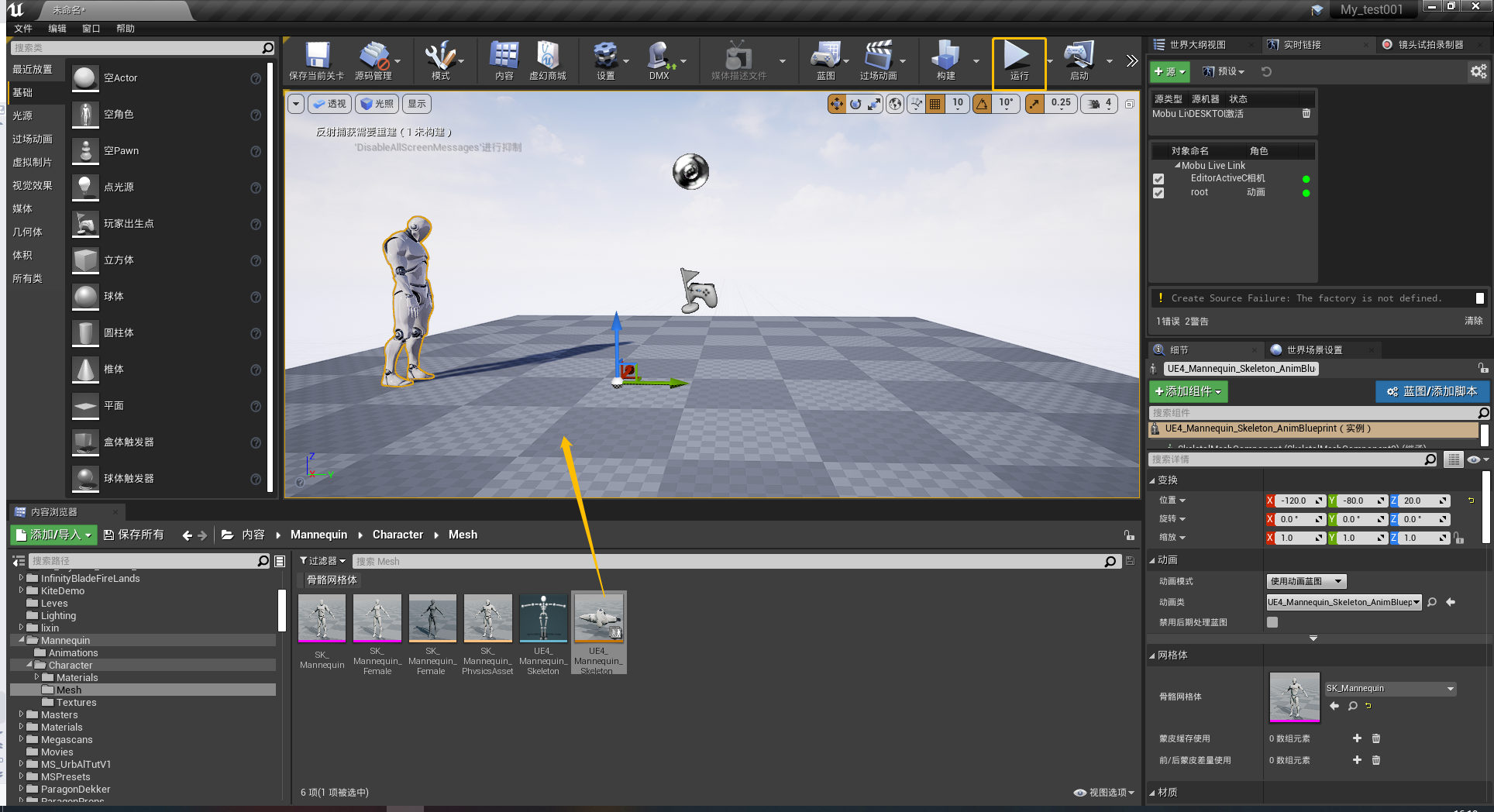
在内容浏览器(Content Browser)中的内容(Content)>人物模型(Mannequin)>角色(Character)>网格体(Mesh)下,打开SK_Mannequin资源。
在预览场景设置(Preview Scene Settings)选项卡上,使用以下设置:
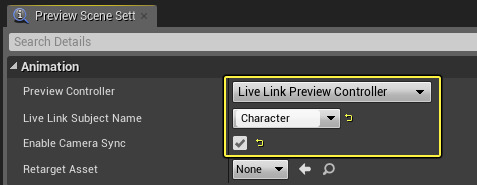
预览控制器(Preview Controller):Live Link预览控制器(Live Link Preview Controller)
主题名称(Subject Name):角色(Character)
启用摄像机同步(Enable Camera Sync):已启用(Enabled)
这使我们可以获取Mobo中名为角色(Character)的主题,并将其流送到UE4
创建动画蓝图
您还可以在内容浏览器(Content Browser)中右键单击特定的骨架网格体或骨架来创建一个以其为目标的动画蓝图。
- 右键单击您想要用作动画蓝图的目标的骨架网格体(或骨架资源),并单击创建(Create)>动画资源(Anim Assets)>动画蓝图(Anim Blueprint)。
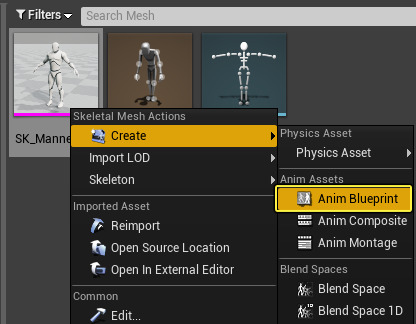
动画蓝图创建于目标骨架网格体资源所在的文件夹中,且允许您随时编辑其名称。
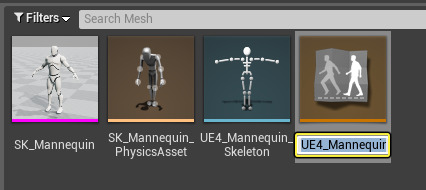
如果需要,您可以为新的动画蓝图输入一个新名称,并按下Enter。
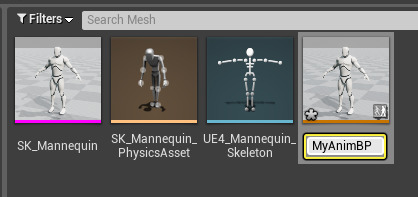
双击打开动画蓝图
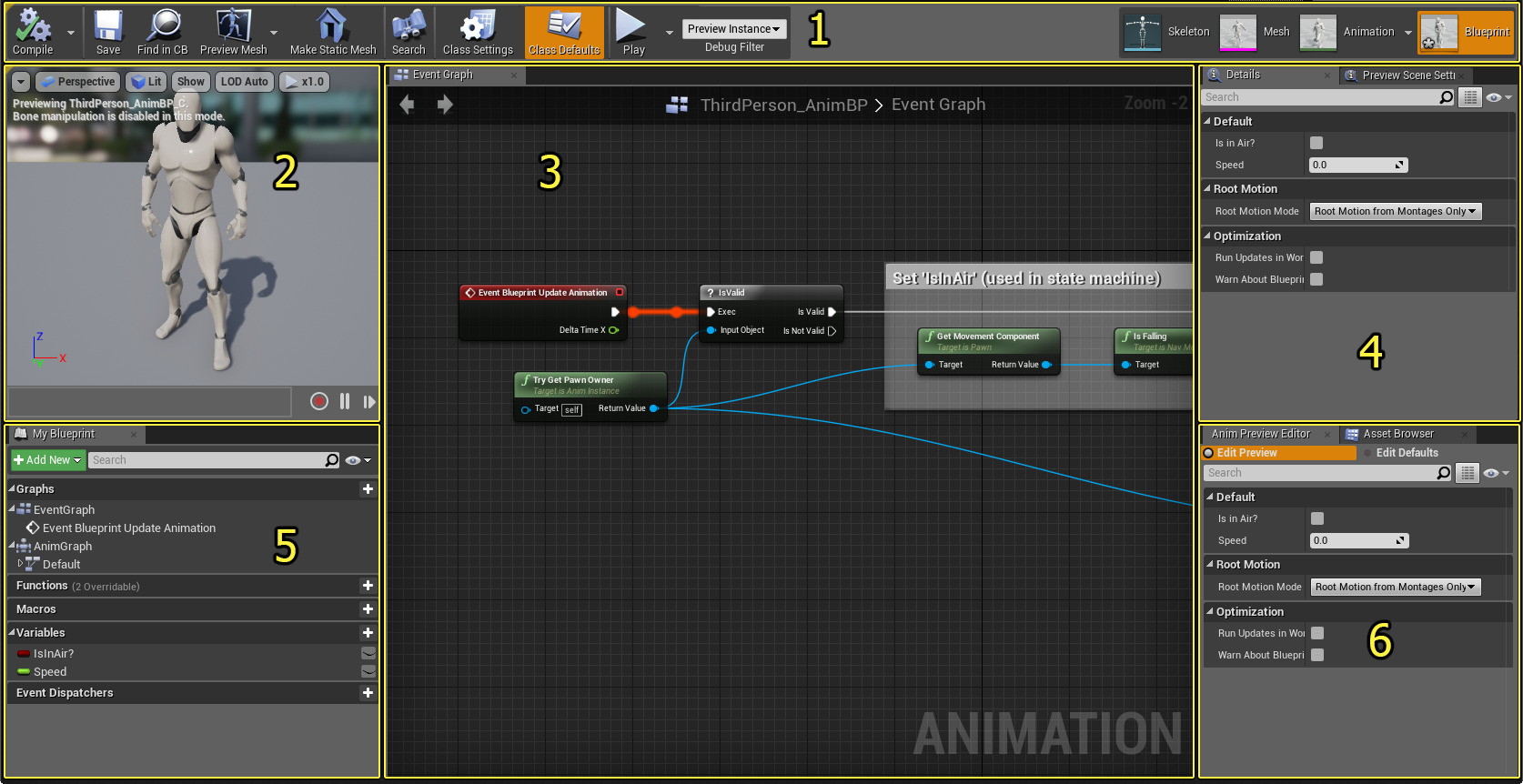
部分来详细:
1-工具栏
2-视口
3-图表
4-细节/预览场景设置
5-我的蓝图
6-动画预览编辑器
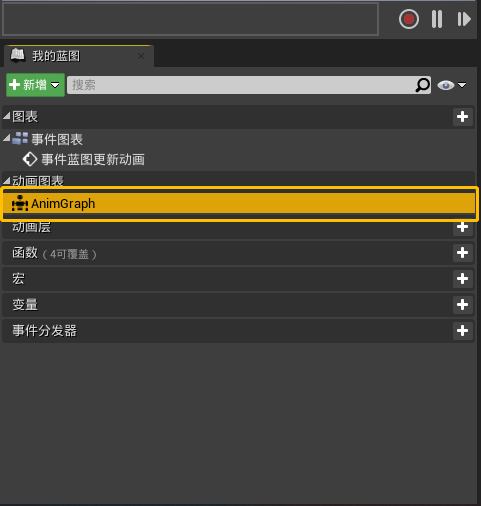
双击AnimGraph跳转到动画图表
在图表右键输入Live Link实时链接
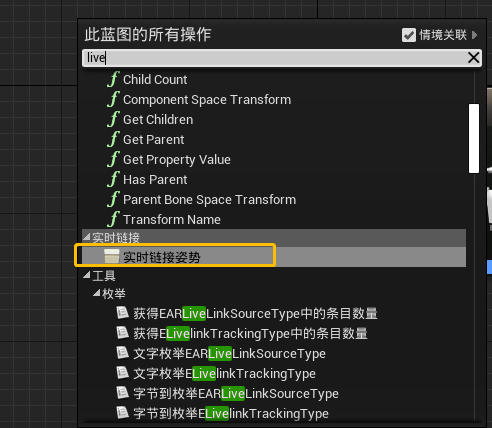
选择数据源

连接实时链接到输出姿势并点击编译
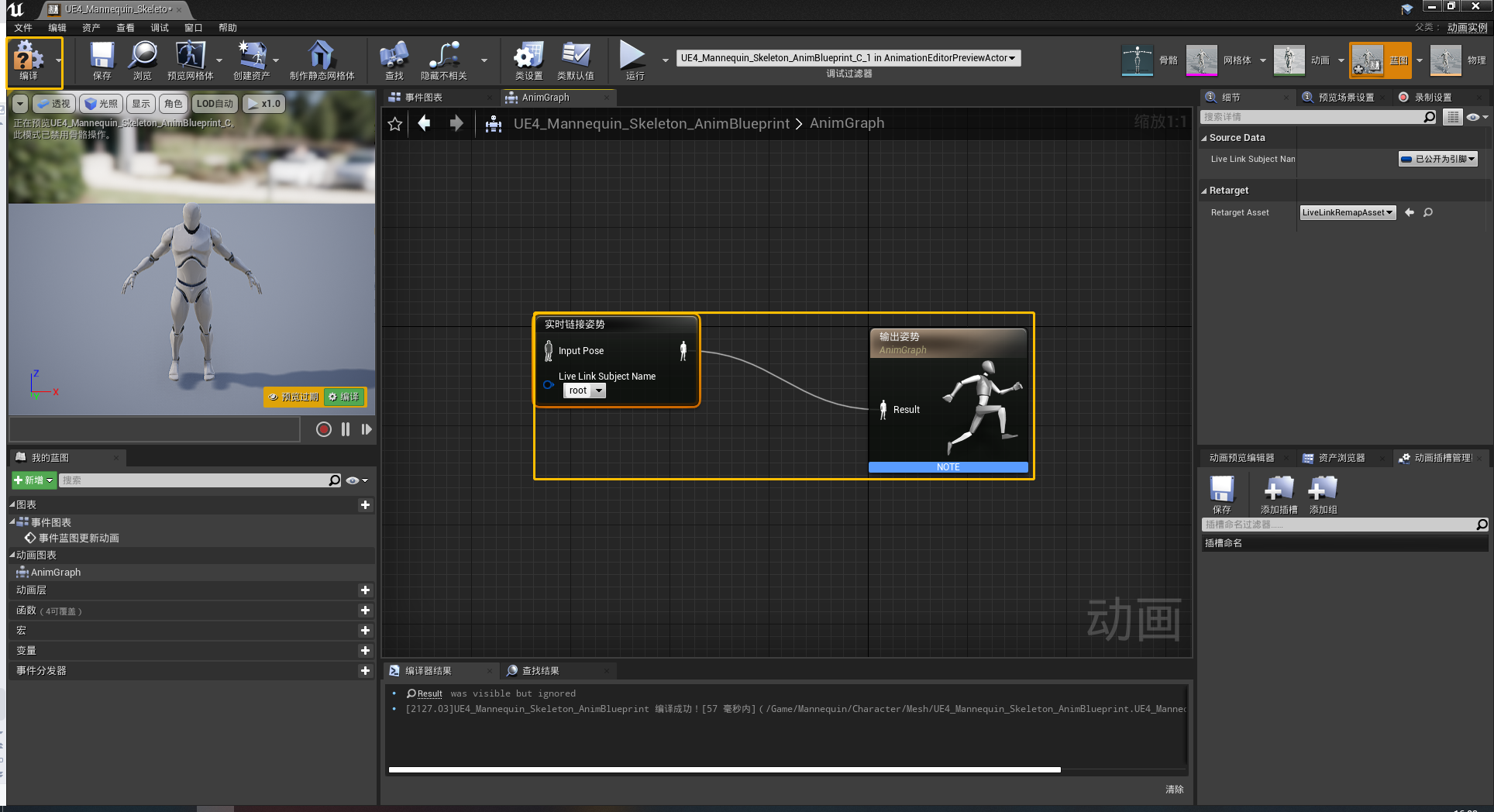
在内容浏览器里拖动动画蓝图到场景中,运行
实时效果
镜头试拍录制器
连接建立后,即可使用镜头试拍录制器捕捉序列。
在UE4项目中,导航到窗口(Window)>镜头试拍录制器(Take Recorder)。
在世界大纲视图中选择Actor。在镜头试拍录制器中,选择+源(+ Source)> 来自Actor(From Actor)> 添加"Actor名称"(Add 'Actor Name')。
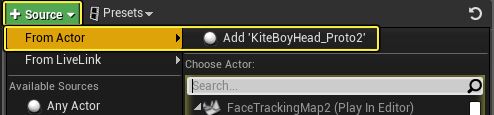
在列表中选择Actor。在Actor设置下,将录制类型(Record Type)改为适当设置。
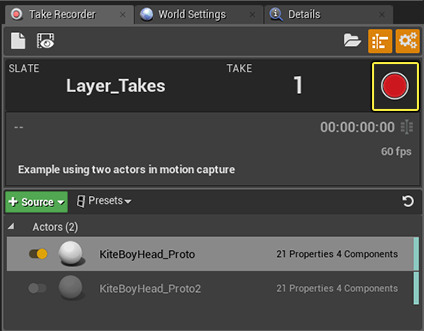
镜头试拍录制器界面
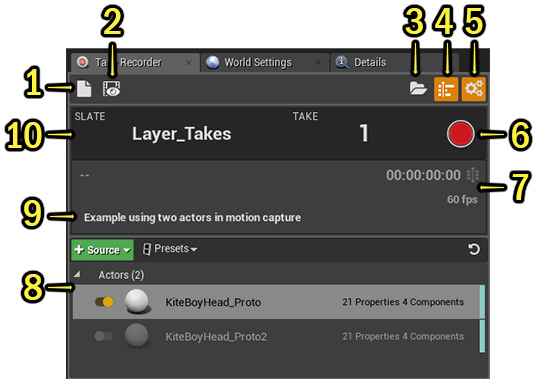
新建镜头
查看上个录制
显示/隐藏镜头游览器
显示/隐藏用于设置镜头的关卡序列
显示/隐藏镜头试拍录制器项目设置
录制镜头
镜头时间戳和帧率
进行录制的源
添加镜头的自定义说明
可编辑Slate镜头的命名和编号
镜头试拍录制器设置
在镜头试拍录制器一般设置中,可调整麦克风、音频、场景和用户设置。
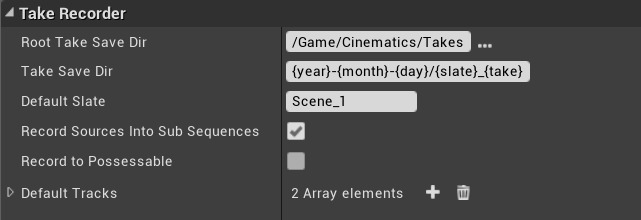
1)镜头保存根目录
2)镜头保存目录
3)默认Slate
4)将源录制到单独序列中
5)录制到Sequence可拥有对象绑定
选择播放(Play),然后选择镜头试拍录制器中的红色录制按钮。录制将在Sequencer中显示实时数据,可在视口中查看实时动作捕捉。
完成录制后,点击镜头试拍录制器中的停止按钮。
注意:
动画录制帧率25FPS
可在Unreal工具栏"编辑"------"项目设置"------"一般设置"------"时间码"
生成默认时间码帧率下拉找到25FPS(PAL/25)
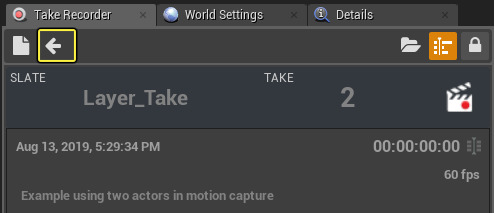
完成录制后,可通过两种方式查看Sequencer中的镜头。首先,可选择查看上一录制(Review the Last Recording)图标(带眼睛的软盘)查看刚刚录制的镜头。 利用此操作可在Sequencer中查看录制的轨迹。若镜头不合需重新录制,可选择返回至待定镜头(Return Back to the Pending Take)箭头图标切回录制模式。
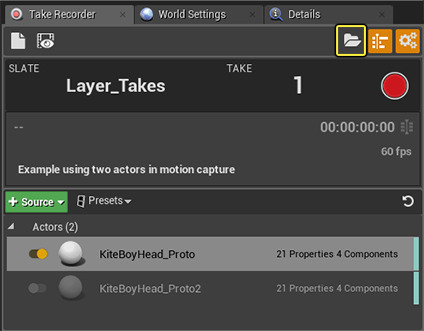
要查看镜头,在镜头试拍录制器中选择镜头浏览器(Take Browser)图标。之后会单独弹出窗口标签,其中包含内容浏览器中所有镜头的文件夹。镜头浏览器使用镜头试拍录制器用户设置中保存的位置。
Teamones
此章节帮助使用工具录制和上传数据
Teamones的界面与任务模块
登录界面
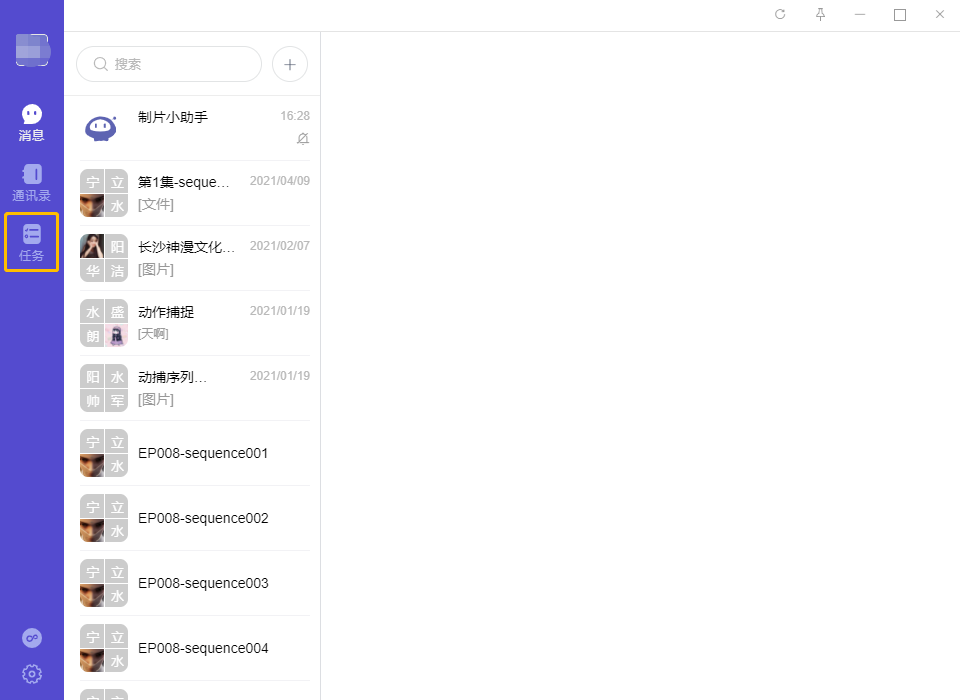
点击任务板块
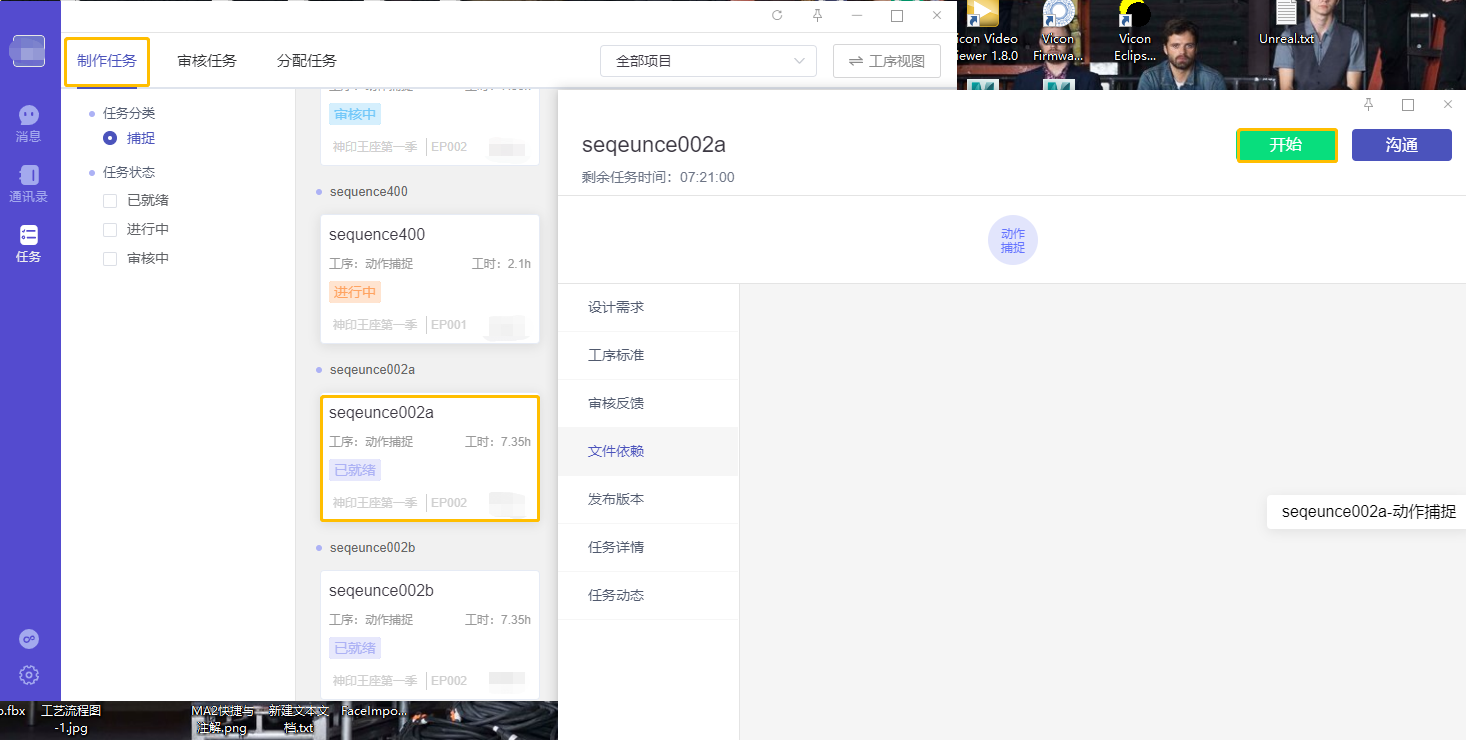
在Temones任务板块制作任务栏,选择当前需要制作的任务,点击开始
启动Temones内置插件功能模块
启动界面左下角TeamonesDCC板块
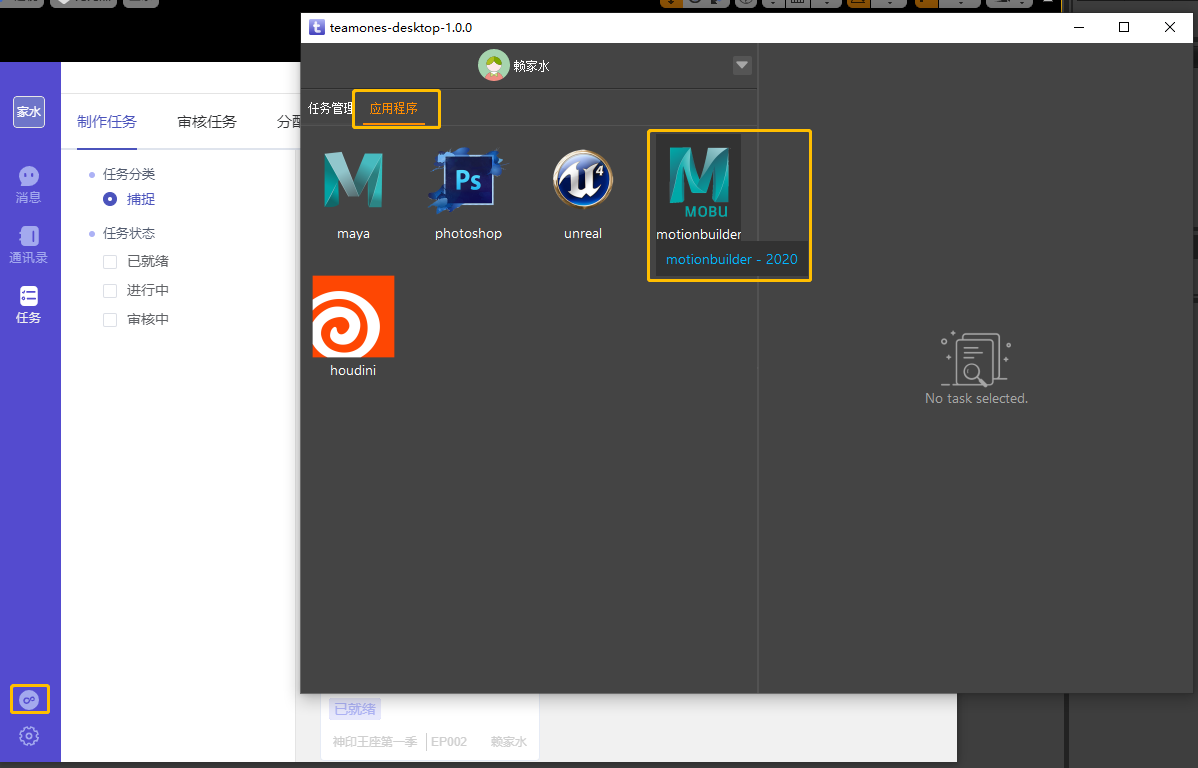
启动Motionbuider应用程序,在工具栏处点击"Vicon_Steam"

选择接收数据的端口:
a. 801(Shogun Live发送的数据)
b. 802(shogun Post发送的数据)
c. 803(shogun Post发哦的数据)
在Motionbuilder工具栏处点击"TEAMONES"
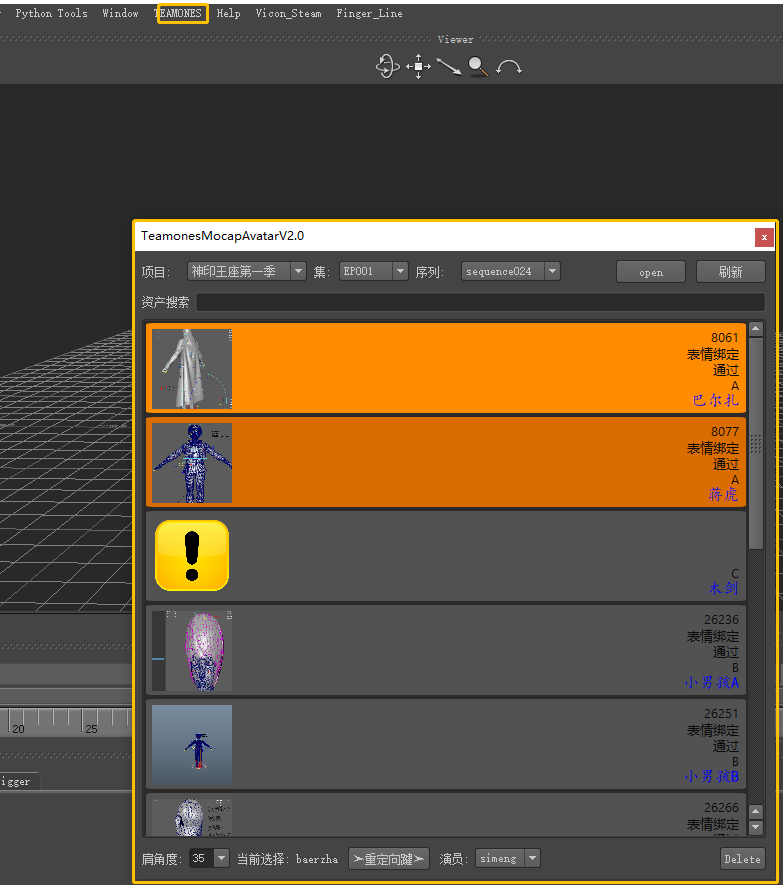
在TeamonesMocapAvatarV2.0窗口,选择对应表演的模型,选择演员,然后点击重定向键。

完成以上操作即可,UE4获取对应数据源(操作详情请移至使用 Live Link获取与Motionbuilder 处)
虚幻引擎项目同步与Teamones工具使用
请安装TortoiseSVN项目同步工具
在指定的E盘空白处右键"检出"
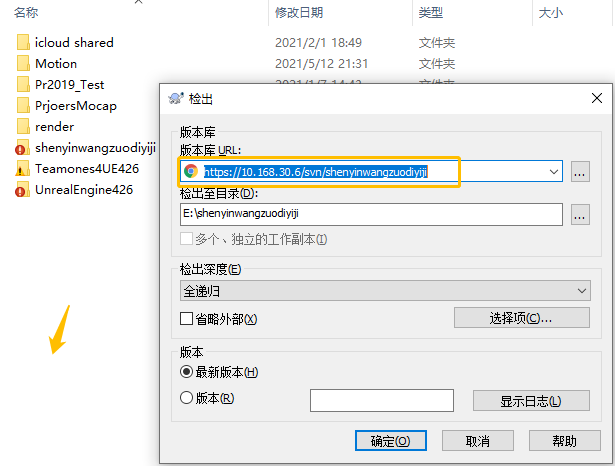
填些对应项目地址URL,点击确定
下载更新完整个项目后,在项目的Content右键点击SVN更新
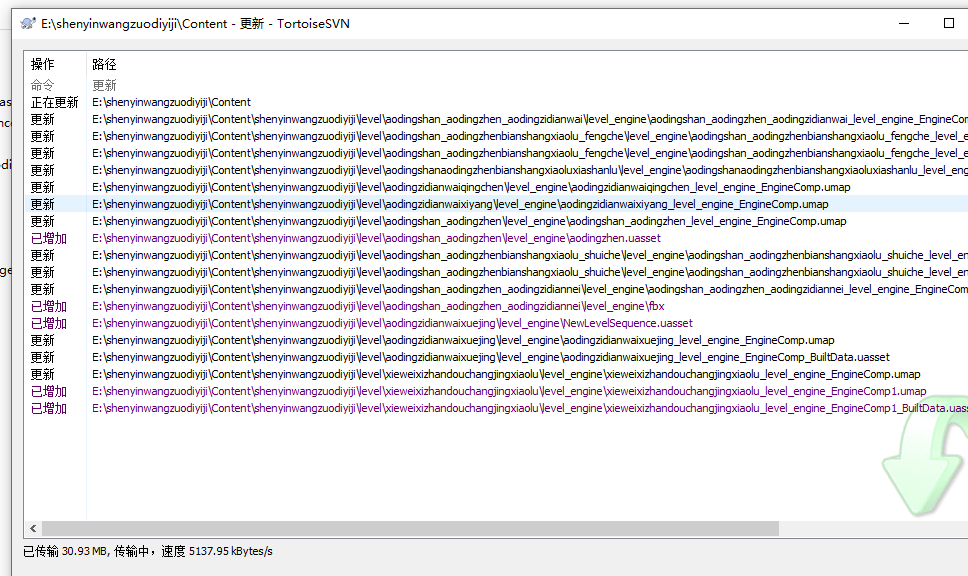
此操作用于每日更新(必要时可以多次更新),提交SVN于每日下午5点
Teamones任务模块点击开始后在引擎界面可以显示【Teamones Pipeline】
点击Teamones进入任务界面(过程中需要登录一次)
点击项目进入任务界面面板
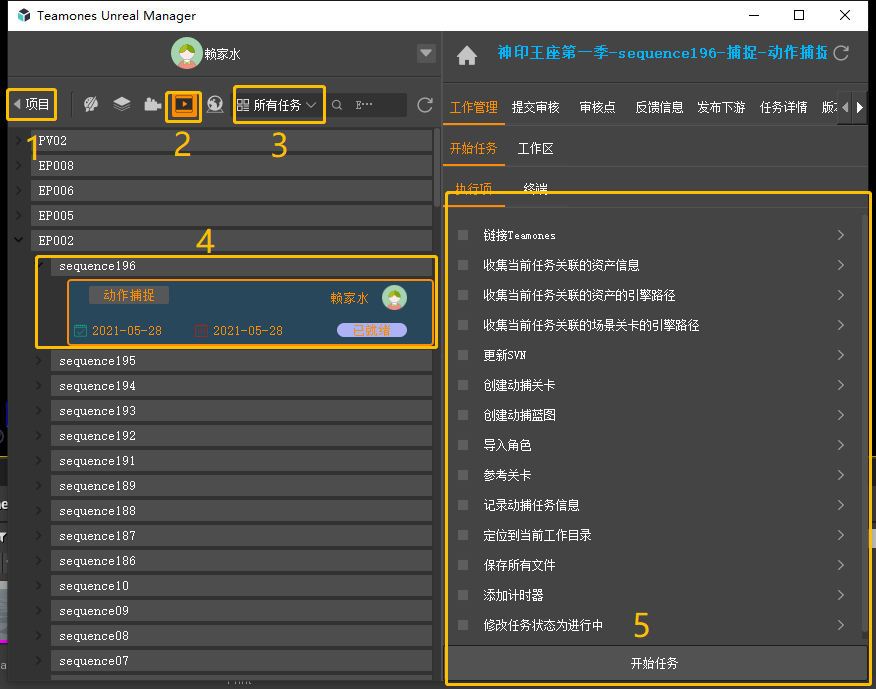
1)执行的项目
2)序列镜头号
3}我的任务/所有任务
4)任务列表
5)任务开始脚本
加载所有模型和关卡后(请查阅 镜头试拍录制器 )做好操作
提交通过和发布
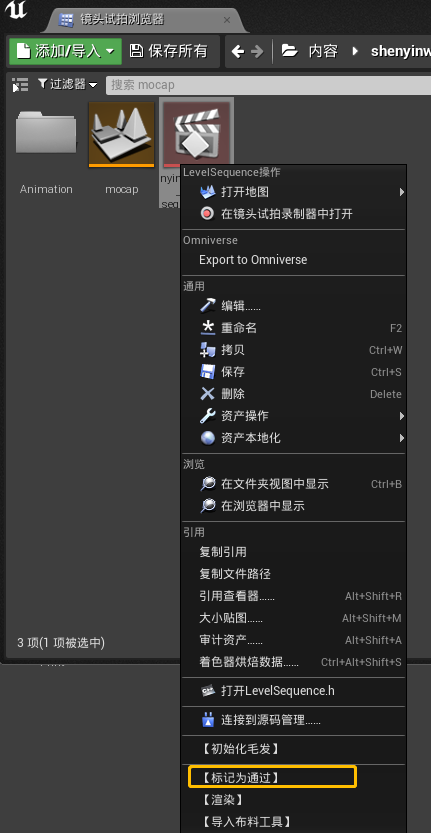
打开试拍游览器,右键标记通过
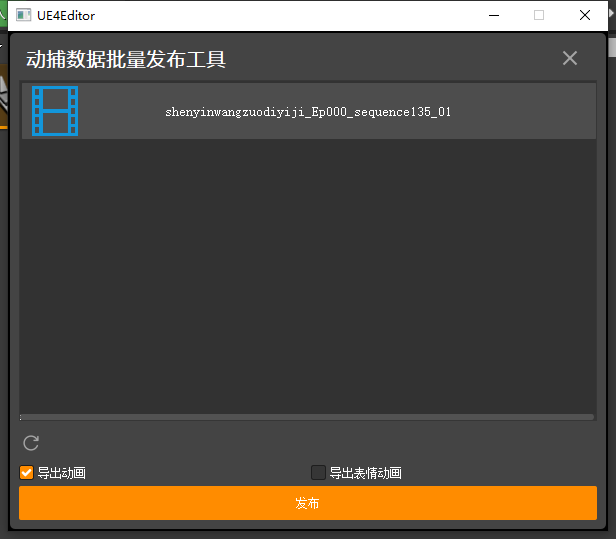
在工具栏"Teamones Pipeline"点击动捕数据发布批量发布工具列表
勾选需要导出的数据类型,点击发布
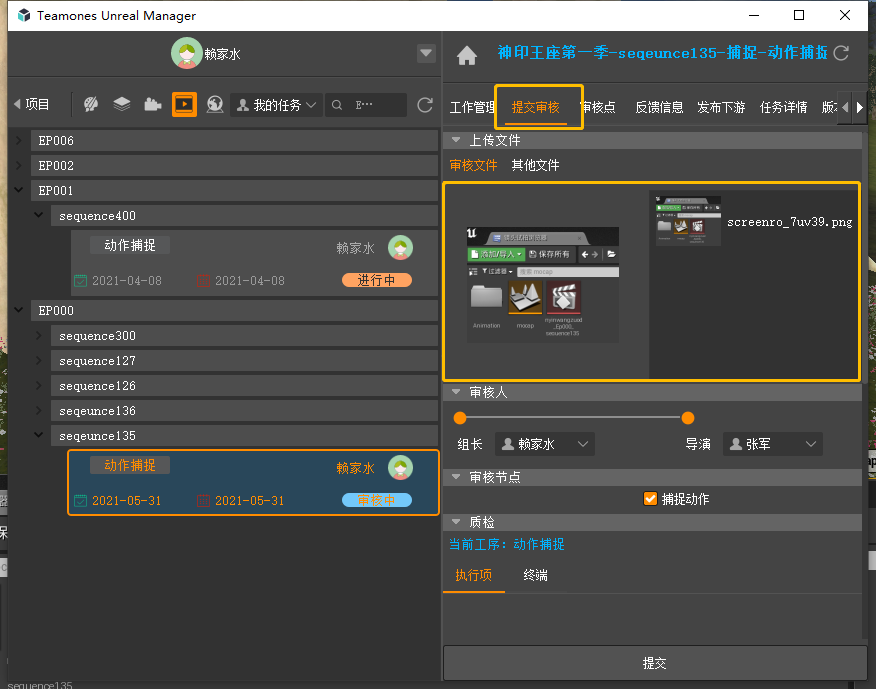
在Teamones任务模板处,提交审核栏点击提交
审核标准
Motionbuilder
在获取Vicon数据源的时,界面数据不会卡顿,FPS在40以上
表演角色对应的模型要正确
虚幻引擎
检查录制根目录与镜头目录是否正确
检查驱动后的模型有没有烂面与骨骼错位情况
检查音频输入是否正常,声音清晰无噪音
录制数据的帧率是否25FPS
数据的质量不会出现掉帧、卡顿、扭曲、抖动
提交文件
引擎输出对应模型的FBX动画文件.fbx
音频.wav
表情数据.Json
场记视频.mov
场记表.xlsx
同步上传SVN工程